Concours National Commun Filière : PSI Session : 2017
Sciences Industrielles pour l’Ingénieur Page 1
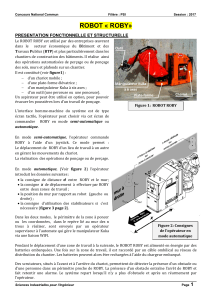
Figure1:ROBOTROBY
Outil
Plate‐formeChariot
ManipulateurKuka
à6axes
Figure2:Consignes
del’opérateuren
modeautomatique
x
ROBOT « ROBY»
PRESENTATION FONCTIONNELLE ET STRUCTURELLE
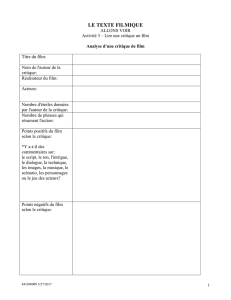
LeROBOTROBYestutilisépardesentreprisesœuvrant
dans le secteur économique du Bâtiment et des
TravauxPublics(BTP)etplusparticulièrementdansles
chantiersdeconstructiondesbâtiments.Ilréaliseainsi
desopérationsautomatiséesdeperçageoudeponçage
dessols,mursetplafondssurunchantier.
Ilestconstitué(voirfigure1):
d’unchariotmobile;
d’uneplate‐formeélévatrice;
d’unmanipulateurKukaàsixaxes;
d’unoutil(uneperceuseouuneponceuse).
Unaspirateurpeutêtreutiliséenoption, pour pouvoir
évacuerlespoussièreslorsd’untravaildeponçage.
L’interface homme‐machine du système est de type
écran tactile, l’opérateur peut choisir via cet écran de
commanderROBYenmodesemi‐automatiqueou
automatique.
En mode semi‐automatique, l’opérateur commande
ROBYàl’aided’unjoystick.Cemodepermet:
LedéplacementdeROBYd’unlieudetravailàunautre
engérantlesmouvementsduchariot.
Laréalisationdesopérationsdeponçageoudeperçage.
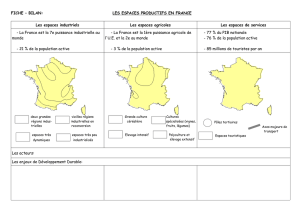
En mode automatique, (Voir figure2) l’opérateur
introduitlesdonnéessuivantes:
laconsignededistancedentreROBYetlemur;
laconsignexdedéplacementàeffectuerparROBY
entredeuxzonesdetravail;
lapositiondumurparrapportaurobot(gaucheou
droite);
laconsigned’utilisationdesstabilisateurssic’est
nécessaire(figure3page2).
Danslesdeuxmodes,lepérimètredelazoneàponcer
ou les coordonnées, dans le repère lié au mur des n
trous à réaliser, sont envoyés par un opérateur
superviseuràl’automatequigèrelemanipulateurKuka
viauneliaisonWIFI.
Pendantledéplacementd’unezonedetravailàlasuivante,leROBOTROBYestalimentéenénergiepardes
batteries embarquées. Une fois sur la zone de travail, il est raccordé par un câble ombilical au réseau de
distributionduchantier.Lesbatteriespeuventalorsêtrerechargéesàl’aideduchargeurembarqué.
Desscrutateurs,situésàl’avantetàl’arrièreduchariot,permettentdedétecterlaprésenced’unobstacleou
d’unepersonnedansunpérimètreprochedeROBY.Laprésenced’unobstacleentraînel’arrêtdeROBYet
fait retentir une alarme. Le système repart lorsqu’il n’y a plus d’obstacle et après un réarmement par
l’opérateur.

Concours National Commun Filière : PSI Session : 2017
Sciences Industrielles pour l’Ingénieur Page 2
Ondonneci‐aprèslediagrammedesexigencesdusystème.
Pourcertainstravaux, deux stabilisateurs
latéraux situés à l’arrière du chariot sont
déployés.Onrenforceainsil’appuientrele
chariotetlesol.
Undétecteurdecouleurfixésurl’outil,repèreuntraitbleu
tracésurlemur(cordex)etpermetainsidelocaliserlazone
detravail.Danslecasduperçage,untélémètre,quidétecte
lapositiondetrousréaliséslorsduprécédentcycle,permet
delocaliserprécisémentlelieudunouveautrouàpercer.
Figure4:Localisationdelazonedetravail
Figure3:Stabilisateurs

Concours National Commun Filière : PSI Session : 2017
Sciences Industrielles pour l’Ingénieur Page 3
I- ANALYSE DU FONCTIONNEMENT
Le documentAnnexe1décritlediagrammed’étatsduROBOTROBYdanslecasdumodede
fonctionnementautomatique.Lafigure2adudocumentAnnexe2représentelechronogrammedécrivant
l’évolutionpartielledudiagrammed’étatslorsqueROBYestenfonctionnementetdanslesous‐état«Plate‐
formeenmouvementdemontée»puissoudainunobstacleseprésentedanssonvoisinage.
Question1:CompléterleschronogrammesdudocumentréponseDR1décrivantlesdeux
possibilitésd’évolutionspartiellesdudiagrammed’étatslorsqueROBYesten
fonctionnementetl’opérateurappuiesurleboutonarrêtd’urgence.
II- ETUDE DU DISPOSITIF DE MISE EN MOUVEMENT DE LA PLATE-FOME
Ons’intéressedanscettepartieàl’étudedudispositifdemiseenmouvementetdemaintienenpositionde
laplate‐formeàlahauteursouhaitée. Ondonneci‐aprèslediagrammedesexigencesrelatifaudispositifde
miseenmouvementdelaplate‐forme:
Lafigure2bdudocumentAnnexe2décritlesconstituantsdudispositifdemiseenmouvementverticalde
laplate‐forme.
II-1 Etude de l’exigence « Déplacement vertical »
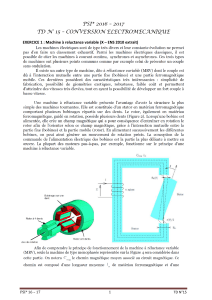
LerobotROBYestreprésentéparleschémacinématiquedelafigure5pagesuivante.Onconsidèrequ’il
estconstituédessolidesindéformablessuivants:
(S1)={chariot,les2colonnes(31),statordumoteur(36),partiesfixesduréducteur(37),
partiesfixesdufrein(35)};
(S5)={arbremoteur,arbred’entréeduréducteur(37)};
(S6)={arbredesortieduréducteur(37),pouliedentée(38)};
(S7)={visàbilles(34),partiesmobilesdufrein(35),pouliedentée(39)};
(S8)={plate‐forme(33),tablier(32),manipulateurKuka}.
L’étudeseferapendantlaphasedemontéedelaplate‐forme,lefrein(35)n’intervientpasdanscettephase,
sespartiesfixesnesontdoncpasreprésentées.LemanipulateurKukaestplié(sesconstituantssontfixes).

Concours National Commun Filière : PSI Session : 2017
Sciences Industrielles pour l’Ingénieur Page 4
O1
H1
H2
O8
H3 (S1)
(S1)
(S1)
(S5)
(S6)
(S7)
(S8)
Courroie (40)
Manipulateur
Kuka plié
1
x
1
y
1
z
1
z
Moteu
r
Réducteur (37)
Figure5
38
39
Données,HypothèsesetParamétrage:
Chariot(S1):Fixeparrapportausol;
Repèrelié
11111
R(O ,x ,y ,z)supposéGaliléen,
levecteuraccélérationdepesanteurest
1
gzg.
Onprendrag=10m/s2.
Solide(S5):
L(S5/S1)=pivotd’axe
31
(H ,z ) ;Momentd’inertie
parrapportàsonaxederotation:Jm;
Vecteurrotation
51 m1
(S / S ) z ;
L’actionmécaniquedumoteursur(S5)est
représentéeparuntorseurcoupledemoment
m1
Cz
Solide(S6):
L(S6/S1)=pivotd’axe
31
(H ,z ) ;Momentd’inertie
parrapportàsonaxederotation:Jr;
Vecteurrotation
61 r1
(S / S ) z .
Solide(S7):
L(S7/S1)=pivotd’axe
11
(O ,z );
L(S7/S8)=hélicoïdaled’axe
81
(O ,z ) ,
héliceàdroite,pasp=10mm;
Momentd’inertieparrapportàsonaxede
rotation:J7;
vecteurrotation
71 71
(S / S ) z .
Solide(S8):
Repèrelié
88111
R(O ,x ,y ,z)
;
L1(S8/S1)=pivotglissant
11
(H ,z ) ;
L2(S8/S1)=pivotglissant
21
(H ,z ) ;
MasseM8,centred’inertieG8telque
88181
8
OG a x b z (a
8,b8constantes);Onnotelevecteurvitesse:
881 81
V(O S /S ) V z .
Lerapportderéductionduréducteur(37)est
rm
n/ 0.1;
Lesdeuxpouliesdentées(38)et(39)ontmêmesrayonsprimitifs:R38=R39;
Touteslesliaisonsserontconsidéréesparfaites,lessolidestournantssontéquilibrésdynamiquementetla
courroie(40)estsupposéedemassenégligeableetinextensible.
Lesautrespartiestournantesduréducteur(37)notéesAPTRserontconsidéréesdemassesnégligées.
Ondonneci‐contrelaloidevitesseV8de(S8)
pendantlaphasedemontéedelaplate‐forme.
Al’instantt=0laplate‐formeestenposition
laplusbasse,àt=t2+t1elleestenposition
laplushaute.OnrappellequeV8Max=0.05m/s.
Question2:
a) Calculerlavaleurminimaledel’instantt2
poursatisfairel’exigenced’identité1.3.1en
termesdecoursedelevage.
b) EtablirlarelationentreV8etm.
c) DéterminerL’énergiecinétiquedel’ensemble(E)={S5,APTR,S6,Courroie(40),S7,S8}
danssonmouvementparrapportà(S1)enfonctiondeJm, Jr, J7,n,p,M8etm.
d) Endéduirelemomentd’inertieJéq del’ensembledesélémentsde(E)ramenéàl’arbre
moteur.
t(sec)
t
1=0.5
0
t
2
t
2+
t
1
V
8(t)
V
8Max

Concours National Commun Filière : PSI Session : 2017
Sciences Industrielles pour l’Ingénieur Page 5
Figure6
O1
H1
H2
O8
(S1)
(S7)
(S8)
Manipulateur Kuka
déployé verticalement
1
x
1
y
1
z
Frein (35)
(S1)
M
Question3:
a) Appliquerlethéorèmedel’énergiecinétiqueàl’ensemble(E)danssonmouvementpar
rapportà(S1).EndéduireCmenfonctiondeJéq,M8,g,n,pet
m.
b) DéterminerenfonctiondeV8Maxetdesdonnéesduproblèmel’expressionducouplemoteur
CmmaximalnotéCmMax.
c) SachantqueJéq=10‐4Kg.m2CalculerlavaleurdeCmMax.
II-2 Etude de l’exigence « Maintien en position » de la plate-forme
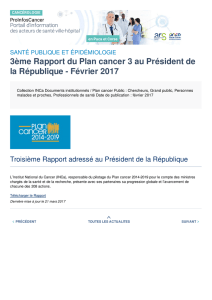
LerobotROBYestreprésentéparleschéma
cinématique de la figure6ci‐contre. On considère
qu’il est constitué des solides indéformables (S1),
(S7)et(S8) précédemment définis à la page3.
L’étudeseferadanslaphasedetravaildel’outil,la
plate‐forme est fixe, le frein(35)estenaction. Le
moteur,leréducteuretlesystèmepoulies‐courroie
n’interviennentpasdanscettephase,ilsnesontdonc
pas représentés. On se place dans le cas le plus
défavorabletelquel’outileffectueuntravailde
ponçage d’une zone située au plafond. Le
manipulateurKukaestdéployéverticalementses
constituantssontquasimentfixes.
Pourlesdonnéesetleparamétragevoirpage4,sauf
pourlesolide(S8)onprendra:
88181
8
OG c x d z (c8,d8constantes)
*Letorseurdel’actionmécaniquedeliaisonde(S7)
sur(S8)seranoté:
78 1 78 1 78 1
78
78 1 78 1 78 1 8
O
Xx Yy Zz
(S S ) Lx My Nz .
*L’actionmécaniquedufrein(35)surlesolide(S7)
est représentée par un torseur couple de moment
f1
Cz.
*L’actionmécaniqueduplafondsurlesolide(S8)au
pointMestreprésentéeparletorseur:
111
8
M8
M
Xx Yy Fz
(plafond S ) M(plafond S) avecF=300N.
Onnégligeleseffetsd’inertiedusaumouvementdel’outildeponçageetdesconstituantsdubras
manipulateurKuka.Lesliaisonsserontconsidéréesparfaitessaufauniveaudufrein(35).
Questionpréliminaire:
Etuded’iso‐hyperstaticitédumécanismedetransformationdemouvementdelaplate‐
forme. Consulter le document réponse DR8 puis répondre directement sur ce document.
Deretouronchoisiralamodélisationdelafigure6etlesdonnéesci‐dessus.Malgréquecettesolutionsoit
hyperstatique,ladémarchederésolutionqu’onvousproposeviseàvaliderlecahierdeschargesentermes
dechoixdufrein(35).
Question4:
a) Déterminerl’équationscalaireissuedel’applicationduthéorèmedelarésultantestatique
ausolide(S8)enprojectionsur
1
z.(On établira le bilan des résultantes correctement)
b) Déterminerl’équationscalaireissuedel’applicationduthéorèmedumomentstatiqueau
pointO8ausolide(S7)enprojectionsur
1
z.(On établira le bilan des moments correctement)
c) DétermineralorslecoupledefreinageCfenfonctiondeM8,g,Fetp.
d) CalculerCfpuisvérifiersilecahierdeschargesestsatisfait.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%