Commande des moteurs à courant continu : HACHEURS
Introduction :
Un hacheur permet d’obtenir une tension unidirectionnelle de valeur moyenne réglable à
partir d’une source de tension continue. C’est un convertisseur continu-continu (tension ve
continue - courant iS continu) dont le symbole est :
Les hacheur sont utilisés pour commander des moteurs à courant continu, parfois de
forte puissance.
Les alimentations à découpage font aussi partie de la famille des hacheurs. Dans ce cas
le but est d’obtenir une tension régulée ; stable et parfaitement continue.
I - Interrupteurs électroniques de puissance :
Transistors bipolaires :
Ils sont robustes, mais leur mise en conduction nécessite un
courant assez important à travers leur circuit base-émetteur.
Si iB = 0 IC = 0, le transistor est bloqué, il se comporte comme
un interrupteur ouvert vu des points E et C.
Si iB > Icsat/β alors Ic = Icsat > 0 et VCE = 0
le transistor est saturé et se comporte comme un interrupteur fermé
vu des points E et C
La commande se fait par le courant iB .
Transistors MOSFET :
Ils sont plus fragiles que les transistors bipolaires, mais leur
commande ne nécessite qu’une faible énergie, car, la grille étant
isolée, l’intensité du courant de commande est quasiment nul.
Si VGS = 0 iD = 0, le transistor est bloqué, il se comporte
comme un interrupteur ouvert vu des points D et S .
Si VGS VGSSAT iD > 0 et VDS = 0, le transistor est saturé et se
comporte comme un interrupteur fermé vu des points D et S et le
circuit de grille ne consomme pas de puissance.
La commande se fait par la tension vGS :
Remarque :
Les interrupteurs électroniques unidirectionnels, quelle
que soit leur nature, peuvent être représentés par le
symbole ci-contre :
Les interrupteurs peuvent devenir bidirectionnels si l’on
place à leur bornes une diode montée en
« Antiparallèle » (Diode de roue libre)

II - Hacheur série
A - Principe
On dispose d’une source de tension continue E constante reliée à une charge ( moteur par
exemple ) par l’intermédiaire d’un interrupteur électronique H.
L'interrupteur H s'ouvre et se ferme périodiquement.
On appelle T cette période et T
f1
la fréquence de hachage. (Plusieurs kHz en pratique )
La durée pendant laquelle l'interrupteur H est fermé s'appelle tF.
On définit le rapport cyclique par : T
tF
α avec 1α0
On peut ainsi écrire que TtF α
Chronogrammes :
Expression de la valeur moyenne de
La tension uc(t) au bornes de la
charge :
C
u
EuC α
On constate que la tension moyenne
C
uest proportionnelle au rapport
cyclique α
Si α varie de 0 à 1 : 1α0
alors
C
u varie de 0 à E :
EuC0
Remarque : la tension moyenne, C
u, ne dépend pas de la fréquence de hachage
B - Hacheur série sur charge inductive (moteur)
Un moteur à courant continu comporte des enroulements d’induit qui se comportent comme
des inductances L. On peux donc modéliser l’induit d’un moteur par une association d’une
force électromotrice E’ en série avec la résistance d’induit R et une inductance L.

1 - Rappel : Propriété des inductances
Equation fondamentale :
uLL.di
dt
De cette équation nous pouvons démontrer les propriétés ci-dessous.
En régime continu établi :
l’inductance se comporte comme un court-circuit.
En régime périodique établi :
la tension moyenne est nulle : 0
L
u
En régime quelconque :
• le courant dans une inductance ne peut pas subir de
discontinuité.
• l’inductance s’oppose aux variations du courant qui
la traverse, et ce d’autant plus que L est grand ;
Conclusion :
Une inductance lisse le courant.
courant pour une charge
résistive :
courant pour une charge
inductive :
Pour cette dernière raison il est parfois utile de placer en série avec le moteur une
« inductance de lissage » afin de maintenir un courant quasi continu dans le moteur.
2 - Problème lié aux charges inductives
A la fermeture de K le courant s’établit.
A l’ouverture de K deux phénomènes contradictoires ont lieu :
• la commande qui veut annuler subitement le courant
• la bobine qui ne peut subir de discontinuité de courant
Résultat du conflit :
c’est la bobine qui « gagne » en provoquant un arc électrique aux
bornes de l’interrupteur pour maintenir le courant.
Conséquence :
L’interrupteur qui est en réalité un transistor subit alors à chaque
blocage une surtension qui peut être destructrice. Il faut prévoir un
système qui permette le blocage normal du transistor.
C’est le rôle de la diode de roue libre (DRL.).

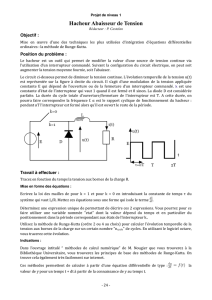
3 – Fonctionnement du hacheur série sur charge R.L.E.
Description :
L'interrupteur H est représenté par son
symbole normalisé.
D est une diode de roue libre.
L permet de lisser le courant i. On
considère que la fréquence de hachage f est
suffisamment importante pour considérer
que i est de forme triangulaire.
Le moteur à courant continu est modélisé
par sa f.é.m. E' et sa résistance d’induit R.
Analyse du fonctionnement : Chronogrammes :
Pour Tt α0
L’interrupteur H est fermé et la diode est
bloquée ( interrupteur ouvert )
Le courant dans le moteur proviens de la
source E à travers l’interrupteur H.
On peut écrire : LC uiREEu .'
Donc : 0.' iREE
dt
di
LuL
Conséquence le courant i(t) augmente
quasi-linéairement de sa valeur mini Imin à
sa valeur maxi IMAX
Pour TtT α
L’interrupteur H est ouvert, le courant dans
le moteur est maintenu non nul en circulant
à travers la diode de roue libre D qui
deviens passante ( uD = 0 )
On a : 0 DC uu
On peut écrire : LC uiREu .'0
Donc : 0.' iRE
dt
di
LuL
Conséquence le courant i(t) diminue quasi-
linéairement de sa valeur maxi IMAX à sa valeur mini Imin

4 – Expression des tensions et intensités
Tension de sortie du Hacheur : EuC
α
Tension aux bornes du moteur : on a LMC uuu
Soit en valeur moyennes :
LMC uuu or 0
L
u
Donc : Euu CM
α
Intensité dans la charge : Si on considère les variations de courant comme linéaire
alors : 2
min
II
iMAX
De plus on peut écrire que : iREuM.'
soit en valeur moyennes : EiREuM
α.'
d’où : REE
i'α
Ondulation du courant :
On définit l’ondulation de courant par : min
IIi MAX
plus cette ondulation est
faible, plus le courant se rapproche d’un courant continu parfaitement lissé. Le but est
aussi d’éviter la conduction discontinue, c.a.d ; que le courant ne s’annule jamais.
On montre que l’ondulation s’exprime par : fL E
i..2
)α1(α
L’ondulation est maximale pour α = 0,5 et vaut : fL
E
i..8
max
Pour diminuer l’ondulation de courant et éviter la conduction discontinue,
il faut augmenter L l’inductance de lissage ou augmenter la fréquence de
hachage.
C’est cette dernière solution qui est en pratique retenue car les bobines de forte inductance
sont chères, et si la fréquence de hachage est suffisamment élevée ( quelques kHz ) la faible
inductance propre de l’induit suffit à lisser le courant sans qu’il soit besoin d’ajouter une
bobine de lissage extérieure.
5 – Variation de vitesse d’un moteur à courant continu
Considérons un hacheur alimentant un
moteur avec un courant parfaitement lissé.
La fem E’ du moteur est proportionnelle
à sa vitesse Ω ( en rd/s)
.' KE ( K constante du moteur)
Le couple moteur est proportionnel à
l’intensité moyenne : iKCm.
En régime permanent on peut écrire :
EiREuM.α.' et Cm = Cr
(couple résistant)
Donc : ...α..α'K
K
C
REiREE r
Soit : 2
..αK
C
R
K
Er
la vitesse est donc fonction du rapport cyclique α
Remarque : Si on néglige la chute de tension dans la résistance d’induit R, K
E
.α
E
 6
7
8
6
7
8
1
/
8
100%