Capteurs et Détecteurs : Cours d'Ingénierie
Telechargé par
Thierno Mamadou Baïlo DIALLO

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 1 -
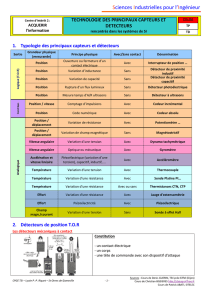
1. Typologie des principaux capteurs et détecteurs
Sortie
Grandeur physique
(mesurande)
Principe physique
Avec/Sans contact
Dénomination
Logique (T.O.R)
Position
Ouverture ou fermeture d’un
contact électrique
Avec
Interrupteur de position …
Position
Variation d’inductance
Sans
Détecteur de proximité
inductif
Position
Variation de capacité
Sans
Détecteur de proximité
capacitif
Position
Rupture d’un flux lumineux
Sans
Détecteur photoélectrique
Position
Mesure temps d'A/R ultrasons
Sans
Détecteur à ultrasons
Numérique
Position / vitesse
Comptage d’impulsions
Avec
Codeur incrémental
Position
Code numérique
Avec
Codeur absolu
Analogique
Position /
déplacement
Variation de résistance
Avec
Potentiomètre …
Position /
déplacement
Variation de champ magnétique
Sans
Magnétostrictif
Vitesse angulaire
Variation d’une tension
Avec
Dynamo tachymétrique
Vitesse angulaire
Optique ou mécanique
Avec
Gyromètre
Accélération et
vitesse linéaire
Piézoélectrique (variation d'une
tension), capacitif, inductif, …
Avec
Accéléromètre
Température
Variation d’une tension
Avec
Thermocouple
Température
Variation d’une résistance
Avec
Sonde Platine Pt…
Température
Variation d’une résistance
Avec ou sans
Thermistances CTN, CTP
Effort
Variation d'une résistance
Avec
Jauge d'extensométrie
Effort
Piézoélectricité
Avec
Piézoélectrique
Champ
magn./courant
Variation d’une tension
Sans
Sonde à effet Hall
2. Détecteurs de position T.O.R
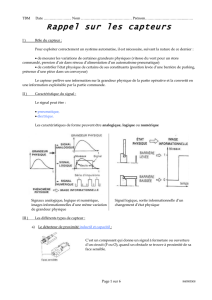
Les détecteurs mécaniques à contact
Constitution
- un contact électrique
- un corps
- une tête de commande avec son dispositif d’attaque
Sciences Industrielles pour l’Ingénieur
Centre d’Intérêt 2 :
ACQUERIR
l'information
TECHNOLOGIE DES PRINCIPAUX CAPTEURS ET
DETECTEURS
rencontrés dans les systèmes de SI
TP
COURS
TD
Sources : Cours de Denis GUERIN, TSI lycée Eiffel (Dijon)
Cours de Christian BISSIERES http://cbissprof.free.fr
Cours de Patrick ABATI, SITELEC

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 2 -
Caractéristiques mécaniques
Caractéristiques électriques
force nécessaire pour déplacer l’organe de
commande (de 0,1 à 20 N)
endurance mécanique ou durée de vie
estimée par le nombre de manœuvres
course du mécanisme
Les interrupteurs de position électromécaniques
détectent la présence ou le passage d’objets
divers. Dans les équipements industriels, ils
participent à la sécurité : contacts de
verrouillage, etc.
nature du courant (continu ou alternatif)
tension nominale
intensité maximale pouvant être coupée
configuration des contacts :
fréquence maximale de déclenchement beaucoup plus
faible que les détecteurs de proximité qui suivent :
Les détecteurs de proximité
Détecteur inductif : détection d’objets métalliques
Détecteur capacitif : détection de tous matériaux
Les détecteurs inductifs produisent à l'extrémité de
leur tête de détection un champ magnétique
oscillant. Ce champ est généré par une bobine et une
capacité montées en parallèle. Lorsqu'un objet
métallique pénètre dans ce champ, il modifie les
paramètres du champ ; cette variation est exploitée
par un amplificateur qui délivre un signal de sortie
le capteur commute (change d'état logique).
Seule une capacité est placée à l'extrémité du
détecteur. Lorsqu'un objet entre dans le champ de
détection du capteur, il modifie la capacité inter
électrodes du capteur et provoque des oscillations
détectées par l’électronique interne de ce capteur le
capteur commute.
La portée utile varie du mm à quelques cm ; au-delà on fait appel aux détecteurs photoélectriques ou aux
détecteurs à ultrasons.
Les détecteurs photoélectriques (optiques)
Ils se composent d'un émetteur de lumière (E) associé à un récepteur (R). La détection d'un objet se fait par coupure
ou variation d'un faisceau lumineux.
A noter aussi : la fourche optique, qui détecte le passage entre E et R face à face :
Système barrage (ou barrière)
Système réflex
Système de proximité
- Grande portée (< 30 m)
- Détection fiable
- Adapté aux environnements
difficiles (fumée, poussière …)
- Portée < 10 m
- Environnement propre
- Portée < 1,5 m
- Détection de cibles fortement
réfléchissantes
- Environnement propre

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 3 -
Organigramme de choix d’un détecteur TOR
Des animations disponibles pour bien comprendre : http://sitelec.org/cours/hu/detecteurs.htm
Les détecteurs ou capteurs à ultrasons
La technologie ultrasons permet de s’affranchir, pour l’objet à détecter, du type de matériau, de sa couleur, de sa
forme ainsi que des conditions ambiantes. Le détecteur à ultrasons ne nécessite pas de réglage, pas d’apprentissage,
pas d’ajustement dans le temps. On trouve aussi bien cette technologie en détecteurs qu'en capteurs de distance.

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 4 -
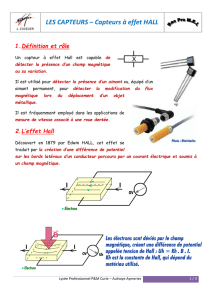
3. Les capteurs de position / déplacement rotatif et rectiligne
Capteur de position/déplacement rotatif résistif
Capteur de position/déplacement rectiligne résistif
L’élément sensible est constitué d’un mélange de
plastique et de carbone résistif. Il est déposé en
couche sur un support circulaire (la piste).
Ces capteurs résistifs sont
actuellement remplacés par les
capteurs magnétostrictifs, plus
précis et résistants.
Principe de mesure de la position x ou
Si on applique une tension continue Va entre les
extrémités A et C, la tension Vm mesurée entre A et B
est proportionnelle au déplacement x ou .
max
Vm Va
max
x
Vm Va
x
4. Les capteurs de position / déplacement numériques : codeurs : voir cours particulier.
5. Les capteurs de vitesse
• La plupart des capteurs de vitesse sont basés sur le comptage pendant un temps donné d'impulsions générées par
un mobile en rotation. La génération de ces impulsions peut être produite par :
- un codeur incrémental (cf. 4.) ;
- une roue dentée passant devant une fourche optique ;
- une roue avec des aimants, passant devant un détecteur à effet Hall (cf. 9.).
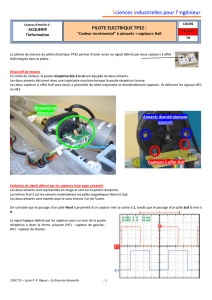
• Un principe analogique est néanmoins très utilisé : la génératrice tachymétrique.
Elle se comporte comme une génératrice à courant continu, et délivre une tension de sortie
proportionnelle à la vitesse d'entraînement du rotor : E = k.Ω.
La mesure précise de cette tension permet
(après filtrage) de connaître indirectement la
vitesse angulaire. Ce capteur doit être monté
directement en bout de l'arbre dont on veut
contrôler la vitesse.
6. Les capteurs d'accélération (accéléromètres)
• Le principe de tous les accéléromètres est basé sur la loi fondamentale de la dynamique
F = m.a
. Plus précisément, il
consiste en l'égalité entre la force d'inertie de la masse sismique m du capteur et une force de rappel appliquée à cette
masse. Ce principe de base peut être décliné par un système masse/ressort ou un système pendulaire.
Un accéléromètre est donc toujours composé d'une masse sismique qui lorsqu'elle est soumise à une accélération va
se déplacer. Un élément sensible utilisant des technologies très différentes suivant les cas permet de mesurer ce
déplacement et d'en déduire l'accélération galiléenne (exprimée en g) à laquelle est soumis le capteur.
Va
Vm
Va
Vm

CPGE TSI – Lycée P.-P. Riquet – St-Orens de Gameville - 5 -
• Il existe un grand nombre
d'accéléromètres différents :
- à détection piézoélectrique
(U selon effort subi, voir 7.)
- à détection piézorésistive (R
selon effort subi)
- à jauge de contrainte
- à détection capacitive
- à détection inductive
- à détection optique
- à poutre vibrante
…
• Ex : accéléromètre MEMS (Micro
Electro Mechanical System) capacitif
Il est composé de 2 peignes
complémentaires formant les
armatures d'un condensateur. L'un est
fixe. L'autre est mobile, suspendu à
une lamelle flexible, et constitue une
masse sensible à l'accélération. Le
peigne mobile peut se déplacer d'une
vingtaine de nm par inertie lorsque
l'objet change de vitesse. La capacité
varie en 1/(distance entre armatures).
• Ex : accéléromètre piézoélectrique :
Kistler 1 axe
Etendue de mesure : 1000 g ± 10 g,
Sensibilité : 500 mV/g
Fréquence : 5… 4000 Hz
Seuil : 1 mg
Applications : automobile, avionique
7. Les capteurs d'efforts : force, couple, pression
Jauges d'extensométrie (ou de contrainte)
Capteur piézoélectrique
• La résistance d’un fil métallique est donnée par la loi
R = .L/s, où est la résistivité (constante), L la
longueur et s la section du fil métallique.
• Les jauges d'extensométrie sont basées sur la
modification de la résistance sous l’effet d’une
déformation mécanique liée à un effort (flexion,
torsion, …) ou à une pression :
0
ΔR ΔL
= K.
RL
R0 : résistance de la jauge au repos.
K : facteur de jauge (dépend du matériau).
• Montage en pont :
Pour exploiter la faible variation de résistance, il faut
placer les jauges dans un pont de Wheatstone :
J0
0
R = R + ΔR
ΔR << R
m0
VΔR
= U. 4.R
Animation :
http://www.rdpe.
com/ex/hiw-sglc.htm
• La piézoélectricité est la propriété que possèdent
certains corps (quartz par ex.) de se polariser
électriquement sous l’action d’une contrainte
mécanique et réciproquement de se déformer
lorsqu’on leur applique un champ électrique.
De façon simple, on peut retenir que la charge
électrique Q (Coulomb) qui apparait sur les électrodes
du capteur est proportionnelle à l’effort F.
Soit Q = k.F avec k de l’ordre de 10-10 C/N.
R2
R2
U
RJ
R1
Vm
VA
VB
électrique
(effort)
(effort)
 6
7
6
7
1
/
7
100%