I ) - Le Site MSMA

TBM Date ……….……….…. Nom ………...………………..………… Prénom………….….……………....……
R
Ra
ap
pp
pe
el
l
s
su
ur
r
l
le
es
s
c
ca
ap
pt
te
eu
ur
rs
s
Page 1 sur 6 840905508
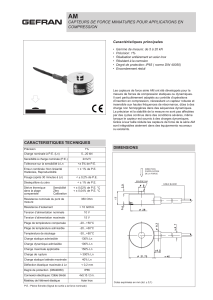
I ) Rôle du capteur :
Pour exploiter correctement un système automatise, il est nécessaire, suivant la nature de ce dernier :
de mesurer les variations de certaines grandeurs physiques (vitesse du vent pour un store
commandé, pression d’air dans réseau d’alimentation d’un automatisme pneumatique)
de contrôler l’état physique de certains de ses constituants (position levée d’une barrière de parking,
présence d’une pièce dans un convoyeur)
Le capteur prélève une information sur la grandeur physique de la partie opérative et la convertit en
une information exploitable par la partie commande.
II ) Caractéristique du signal :
Le signal peut être :
pneumatique,
électrique.
Les caractéristiques de forme peuvent être analogique, logique ou numérique
Signaux analogique, logique et numérique, Signal logique, sortie informationnelle d’un
images informationnelles d’une même variation changement d’état physique
de grandeur physique
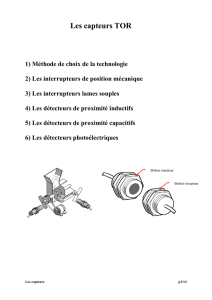
III ) Les différents types de capteur :
a) Le détecteur de proximité inductif et capacitif :
C’est un composant qui donne un signal à fermeture ou ouverture
d’un circuit (F ou O), quand un obstacle se trouve à proximité de sa
face sensible.

TBM Date ……….……….…. Nom ………...………………..………… Prénom………….….……………....……
R
Ra
ap
pp
pe
el
l
s
su
ur
r
l
le
es
s
c
ca
ap
pt
te
eu
ur
rs
s
Page 2 sur 6 840905508
Il en existe deux types
Le détecteur de proximité inductif Le détecteur de proximité capacitif
pour la détection des objets métalliques, pour la détection d’objets isolants,
b) Les interrupteurs à lame souple :
Dans une ampoule de gaz neutre, deux lames métalliques se touchent
lorsqu’elles sont soumises à un champ magnétique. Ces capteurs sont
surtout utilisés pour détecter la position d’un vérin dont le piston
comporte un aimant permanent.
c) Les détecteurs électromécaniques :
Poussoir poussoir à galet levier à galet
Appelé aussi détecteur de position,
interrupteur de position, interrupteur de fin
de course, ils peuvent être à sortie :
pneumatique
électrique
d) Les détecteurs photo-électriques :
C’est un capteur qui comporte deux parties
un émetteur de lumière,
un récepteur de lumière (opto-électrique), ces deux parties pouvant être logées dans le même boîtier.
Le capteur donne un signal : fermeture ou ouverture d’un circuit, quand la liaison lumineuse entre l’émetteur
et le récepteur est rompue.

TBM Date ……….……….…. Nom ………...………………..………… Prénom………….….……………....……
R
Ra
ap
pp
pe
el
l
s
su
ur
r
l
le
es
s
c
ca
ap
pt
te
eu
ur
rs
s
Page 3 sur 6 840905508
Trois systèmes sont couramment utilisés :
Barrage, pour les distances importantes (plusieurs mètres)
émetteur et récepteur sont dans deux boîtiers distincts.
Récepteur
Emetteur
Reflex ,un boîtier émetteur et récepteur et un miroir ou
catadioptre, pour les distances moyennes.
Catadioptre
Emetteur
Récepteur
Proximité, c’est l’objet qui renvoie le rayon lumineux, il doit
donc être brillant ou de couleur claire.
Schématisation :
Emetteur Objet
Récepteur
e) Les capteurs à fibre optique :
Les capteurs à fibre optique fonctionnent sur le même principe que la
cellule photo-électrique, mais le faisceau lumineux est véhiculé par
un câble optique qui peut être composé de plusieurs fibres
f) Les détecteurs à ultrasons :
Les ultrasons sont émis à une fréquence proche de 1 mégahertz. Cette fréquence n’est pas audible. Ce
faisceau ultrasonore est dirigé vers l’objet à détecter. Suivant la distance entre l’émetteur et l’objet, l’écho qui
revient vers le récepteur est plus ou moins fort. Quand le seuil pré-réglé est atteint, le capteur ouvre ou ferme
un circuit électrique. Ce système est utilisé pour pour commander l’ouverture des portes de magasin, ou
encore pour surveiller des zones dangereuses ou interdites
g) Les détecteurs de pression :
C’est un détecteur qui réagit à une pression supérieure à la pression
atmosphérique, c’est un pressostat. Il est aussi appelé manocontact
ou contact électrique à pression.
h) Les détecteurs de dépression :
C’est un détecteur qui réagit à une pression inférieure à la pression
Atmosphérique. Il est aussi appelé vacuostat.

TBM Date ……….……….…. Nom ………...………………..………… Prénom………….….……………....……
R
Ra
ap
pp
pe
el
l
s
su
ur
r
l
le
es
s
c
ca
ap
pt
te
eu
ur
rs
s
Page 4 sur 6 840905508
i) Le codeur de déplacement :
Ces codeurs de déplacement, ou codeurs digitaux peuvent être
optiques. Dans ce cas la lumière émise par un émetteur type diode
éiectroluminescente éclaire un élément codé, règle ou disque,
présentant des zones transparentes et des zones opaques. Un
récepteur de lumière photodiode ou phototransistor, transforme
chaque éclairement en une impulsion. Mesurer le déplacement
revient à compter les impulsions.
IV ) Câblage des capteurs :
Le principe de raccordement des fils consiste à envoyer un signal électrique vers l’entrée
choisie sur l’automate dès que l’information est présente. Suivant les caractéristiques de l’API, les capteurs
peuvent être de technologie PNP (Positif-Négatif-Positif) ou NPN (Négatif-Positif-Négatif).
a) Deux fils :
Intérieur de l’API
Entrée 4
NO
TD : Alimentez la charge 4

TBM Date ……….……….…. Nom ………...………………..………… Prénom………….….……………....……
R
Ra
ap
pp
pe
el
l
s
su
ur
r
l
le
es
s
c
ca
ap
pt
te
eu
ur
rs
s
Page 5 sur 6 840905508
b) Trois fils, capteur PNP :
Chaque charge est reliée à la borne 0, donc pour que les charges soient sous tension, il faut relier
l’entrée correspondante avec du 24 V. Ici, l’automate n’accepte que du PNP
Intérieur de l’API
P
PNP
P
NO
N
TD : Alimentez la charge 1
 6
6
1
/
6
100%