Automatisme Industriel : Logique, Algèbre de Boole et API
Telechargé par
Achrafboudara Mercedes

AUTOMATISME INDUSTRIELLE
Filière : (GEAA 3 & GERN 3)
Omar DIOURI
Email : omar.diouri1@gmail.com Année Universitaire 2018/2019

2
Introduction
L’automatisme est devenu une technologie incontournable aujourd’hui de par son utilisation
dans tous les domaines de fabrication. Il est donc important d’en connaître les bases et d’en
suivre l’évolution.

3
Introduction

4
Introduction

5
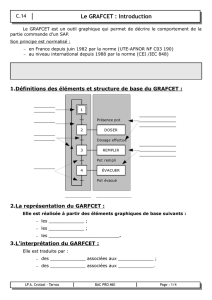
Schéma en logique binaire
La logique combinatoire
Les opérateurs logiques représentent des fonctions permettant de transformer ou d’associer des valeurs
booléennes (0 ou 1). Ces variables représentent un état vrai (1) ou un état faux (0). Dans la liste suivante, les
fonctions logiques sont représentées selon la norme européenne et la norme américaine.
Dans la deuxième colonne se trouve la table de vérité donnant l’état de la sortie de la cellule logique en
fonction de l’état de son ou ses entrées. La troisième colonne donne l’équation logique de l’opérateur.Le
schéma électrique équivalent est représenté dans la quatrième colonne.
Opérateur logique "OUI"
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
1
/
98
100%