1
REPUBLIQUE DEMOCRATIQUE DU CONGO
MINISTERE DE L’ENSEIGNEMENT SUPERIEUR ET
UNIVERSITAIRE
UNIVERSITE DE KINSHASA
FACULTE DES SCIENCES
Département de PHYSIQUE
INTRODUCTION A LA GEOPHYSIQUE
Par
Prof Dieudonné WAFULA MIFUNDU
Prof
Année Académique 2018-2019

2
Chapitre 1 : LA GEOPHYSIQUE
1.1. INTRODUCTION
La géophysique est une grande discipline des sciences de la Terre. Elle concerne l’étude
des caractéristiques physiques de la Terre, ou d'autres planètes, utilisant des techniques
de mesures indirectes (gravimétrie, géomagnétisme, sismologie, radar géologique,
résistivité apparente, etc.)
La géophysique se propose à l'aide d'hypothèses géologiques, de valider un modèle
mathématique issu de mesures faites sur le terrain. Elle se trouve donc à la confluence de
la géologie, de la physique, des mathématiques et de l'informatique.
Il semble que le terme de "géophysique" fut utilisé pour la première fois en Allemagne, où
il apparait dans les écrits scientifiques de Fröbel1 en 1834. Ce furent cependant les frères
Schlumberger qui, dans les années 1920, connurent les premiers succès commerciaux.
On subdivise les différents domaines de la géophysique en géophysique interne, en
géophysique des couches-limites et en géophysique externe comme suit :
1.1. GEOPHYSIQUE INTERNE
La Géophysique Interne englobe les disciplines suivantes :
la géodésie s'intéresse à la figure de la terre, autrement dit à la forme et aux
dimensions de la Terre, et s'avère utile pour déterminer les déformations en surface
de la Terre et, depuis le dernier quart du XXe siècle, de mettre en évidence des
mouvements de plaques tectoniques.
la gravimétrie étudie le champ de pesanteur terrestre et constitue une partie
essentielle de la géodésie physique ; on utilise les techniques gravimétriques
couramment pour une première reconnaissance de champs pétrolifères ou miniers
(prospection gravimétrique) ou archéologique (zonage microgravimétrique).
Le géomagnétisme étudie l'origine et les variations spatiales et temporelles du
champ magnétique de la Terre. On distingue le géomagnétisme interne, dont
l'étude relève de la géophysique interne, et le géomagnétisme externe, dont l'étude
se place dans le cadre de l'aéronomie spatiale et de l'étude des interactions entre le
Soleil et la Terre.
Le paléomagnétisme constitue un domaine à part du géomagnétisme interne et
fournit, au moyen de l'étude de l'aimantation fossile des roches, des indications sur
le mouvement des plaques tectoniques au cours des époques géologiques.
L'archéomagnétisme, qui fut à l'origine du paléomagnétisme, est une méthode
permettant d'étudier les variations du champ géomagnétique au cours des derniers
millénaires et constitue accessoirement une méthode de datation de certains sites
archéologiques.
La Séismologie (sismologie) étudie l'origine, la nature et les effets des séismes ;
elle est sans doute la science ayant contribué le plus à la connaissance de
l'intérieur de la Terre. En particulier, la sismologie théorique étudie la propagation

3
des ondes sismiques et les oscillations libres de la Terre ; tandis que la sismologie
instrumentale s'occupe de développer et de construire des instruments utilisés pour
détecter et enregistrer des vibrations sismiques (sismographes et sismomètres).
La sismologie expérimentale s'occupe, parmi beaucoup d'autres choses, de
l'analyse et de l'interprétation des sismogrammes et de la définition des magnitudes
et des moments sismiques.
La sismogenèse s'intéresse aux phénomènes de microfissuration, de fracturation et
de rupture qui sont à l'origine des séismes (mécanisme au foyer).
La sismotectonique traite la relation entre les tremblements de terre et la
tectonique.
La paléosismologie tente de découvrir dans les strates géologiques des indications
sur des séismes passés et de dater ceux-ci afin de recueillir des données pour les
besoins d'une prévision statistique des séismes.
la géodynamique, et notamment la géodynamique mathématique, étudie les
déformations globales de la Terre produites notamment par les forces de marée
luni-solaires ou par des charges périodiques ou non (houle, pression
atmosphérique variable, raz-de-marée…), les mouvements de précession et de
nutation de la Terre dans l'espace, les courants de convection dans le manteau, le
soulèvement post-glaciaire et les renseignements qu'on peut en tirer concernant la
viscosité des couches profondes, etc.
la géophysique mathématique, dont le but principal est de modéliser
quantitativement la structure de l'intérieur de la Terre en utilisant les lois
fondamentales de la physique et des méthodes avancées de traitement statistique
des données (inversion, tomographie).
la géophysique appliquée s'intéresse aux couches externes de la croûte terrestre et
a pour but de rechercher des gisements de pétrole et de minerais utiles ; on peut
aussi englober dans la géophysique appliquée certaines études environnementales
qui font appel à des méthodes géophysiques (géophysique environnementale).
Les méthodes les plus importantes auxquelles la prospection géophysique et la
géophysique environnementale font appel sont la sismique réflexion et la sismique
réfraction (méthodes de prospection qui visualise les structures en profondeur
grâce à l'analyse des échos d'ondes sismiques créées artificiellement par des
explosions ou par des appareils générateurs de vibrations proches de la surface du
sol).
Les prospection gravimétrique, magnétique, électrique, électromagnétique et le
géoradar ; le génie sismique, essaient notamment de dresser des cartes de risque
sismique, de fixer des normes antisismiques, de prévoir éventuellement des
séismes, etc. Ils peuvent aussi se ranger parmi les domaines de la géophysique
environnementale, de même que la volcanologie, la géothermie et l'étude du flux de
chaleur sortant de la Terre, ou encore les problèmes liés à la sécurité dans les
zones minières et à l'amélioration de l'environnement et de la sécurité en général
(prévision de risques liés au sous-sol et au sol, études d'impact, implantation
d'ouvrages d'art, étudiés notamment en géotechnique.
1.2. GEOPHYSIQUE DES COUCHES-LIMITES
La Géophysique des couches-limites comprend les domaines tels que:
L'océanographie et l'océanologie physique étudient les mouvements et les divers
phénomènes océaniques (marées, courants, vagues…).

4
L'hydrologie étudie notamment la physique, la chimie et la circulation des eaux
dans les rivières et les lacs, et les variations de la nappe phréatique.
La météorologie s'occupe de la circulation des masses d'air et de la prévision des
phénomènes atmosphériques, notamment du temps, des tempêtes et des
ouragans ;
La climatologie étudie les différents climats et explique les mouvements
atmosphériques à grande échelle et à long terme ;
La glaciologie étudie la nature physique et chimique des systèmes glaciaires et
périglaciaires.
1.3. GEOPHYSIQUE EXTERNE
Le géomagnétisme externe étudie les variations rapides du champ géomagnétique
(pulsations, baies, orages magnétiques), et s'inscrit dans le cadre général de:
- l'aéronomie spatiale, qui étudie la haute atmosphère (stratosphère, ionosphère), la
magnétosphère, le vent solaire, les ceintures de Van Allen, les courants telluriques,
l'énergie électromagnétique, etc) et les relations soli-terrestres, lesquelles sont à
l'origine des aurores polaires.
- l'électricité atmosphérique (étude du rayonnement cosmique).
- la pression atmosphérique (chauffage de la Terre, flux de chaleur, la
volcanologie,et les sources chaudes).
1.4. GEOPHYSICIEN
Le géophysicien est le physicien spécialisé dans l’étude de la Terre. Il s’intéresse aux
différentes propriétés physiques des sols et des roches.
A l’aide d’appareils de mesure et de capteurs, il observe les variations spatiales et
temporelles des propriétés électriques, magnétiques, électromagnétiques, gravimétriques
ou acoustiques du sous-sol.
Après étude, traitement, et inversion des données, dans le cadre d'un modèle prédéfini, il
peut caractériser et imager le sous-sol en 1D, 2D, 3D et 4D (suivi 3D).
Il apporte ainsi une compétence technique de pointe, et souvent, un éclairage nouveau
quant à la nature d’un sol.
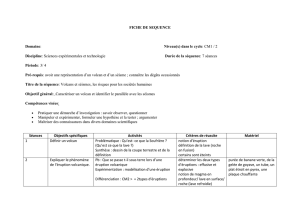
Les géophysiciens doivent souvent installer de l'équipement sur le terrain. Ici, un
numériseur de données sismiques et un disque dur reliés par un câblage de terrain sont
utilisés.
1.5. GEOPHYSIQUE APPLIQUEE
La géophysique appliquée est une branche de la géophysique qui utilise des méthodes
pour mesurer les propriétés physiques du sous-sol terrestre, afin de détecter ou de
déduire la présence et la position des concentrations de minerais et d'hydrocarbures.

5
1.6. EXPLORATION GEOPHYSIQUE ET TECHNIQUES
1.6.1. Exploration Géophysique
L'exploration géophysique fait appel à l'étude de la variation des propriétés physiques des
sols dans l'espace, mais aussi dans le temps:
à l’échelle du kilomètre (recherche pétrolière et gazière, recherche minière,
géothermie),
à l’échelle du centimètre à la centaine de mètres (génie civil, hydrogéologie,
géologie, prévention des risques, archéologie).
1.6.2. Techniques
i. Trainé électrique (Cartographie)
Principe
Le traîné électrique est une méthode de prospection géophysique qui permet de
caractériser le sous-sol par le biais d’une interprétation de la résistivité apparente du
terrain. Les mesures se font en mesurant une différence de potentiel (ΔV) et une intensité
(I).
Sur le terrain, on réalise la prospection en implantant des électrodes, puis en effectuant la
mesure de la résistivité apparente. Enfin, on dresse une carte de la parcelle après calcul
de la résistivité électrique du sol.
ii. Panneau électrique (Profil)
Principe
Le panneau électrique, comme le trainé électrique, repose sur la mesure d’une différence
de potentiel et d’un courant entre deux électrodes implantées dans le sol, afin de calculer
la résistance électrique du terrain.
Un panneau électrique est en fait composé d’une multitude de point de sondage. En effet,
on utilise la plage des 32 électrodes pour créer différents écartements (minimum 1,5m, et
maximum 10m) sans avoir à déplacer les électrodes ; ce qui diminue considérablement le
temps des mesures. En effet, grâce à ce système, on peut faire 155 configurations de
sondages différents (grâce au multiplexeur) et effectuer les mesures en ½ heure environ.
Sondage électrique (Sondage)
L’objectif du sondage est de savoir comment varie verticalement la résistivité apparente,
en un point donné à la surface. Sachant que la profondeur d’investigation dépend de la
dimension du dispositif, on effectue une succession de mesures en augmentant à chaque
fois la longueur du dispositif, ainsi l’augmentation de celui-ci entérinera une plus grande
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
1
/
131
100%