Universit´e Claude Bernard–Lyon I
CAPES de Math´ematiques : Oral
Ann´ee 2006–2007
M´ethode d’Euler
pour les ´equations diff´erentielles
A ne pas rater
•L’exemple canonique : y′=ay ;
•la justification de la convergence de la m´ethode pour au moins un type d’´equations ;
•un vrai exemple num´erique impl´ement´e en machine (pas fait ici).
Pour enrichir
•Sur l’exemple canonique y′=ay, un sch´ema implicite ;
•la justification de la convergence de la m´ethode pour toutes les ´equations y′=f(t, y) ;
•la stabilit´e de la m´ethode.
1◦Probl`eme et m´ethode
On cherche `a calculer une approximation de la solution du probl`eme de Cauchy suivant
∀t∈[0, T ], y′(t) = f(t, y(t)), y(0) = u0,
o`u fest une fonction “assez r´eguli`ere”, d´efinie sur une partie de R2,u0∈R.
On fixe h > 0 et on approxime la solution udu probl`eme de Cauchy par une fonction affine sur
chacun des intervalles [tn, tn+1] = [nh, (n+ 1)h]. Il suffit donc de d´efinir la valeur ynde cette
fonction en tn, pour 0 ≤n≤T/h.
On part d’une approximation y0de u0(apr`es tout, on n’a pas de raison de penser qu’on connait
ou qu’on sait calculer u0exactement). Supposons connaˆıtre y0,...,yn, on pose :
(∗)yn+1 =yn+h f(tn, yn).
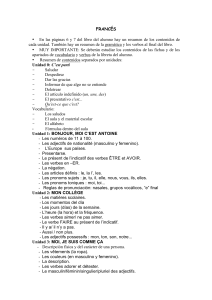
Justification g´eom´etrique : Le point (tn+1, yn+1) est sur la droite contenant (tn, yn) et de
pente f(tn, yn). Or, f(tn, yn) est la pente de la tangente `a la courbe de ˜u, solution du probl`eme
de Cauchy suivant :
y′(t) = f(t, y(t)), y(tn) = yn.
Le sens g´eom´etrique de la relation (∗), c’est donc d’approximer la courbe de u, par celle de ˜u,
puis d’approximer cette derni`ere par sa tangente en (tn, yn).
-
u0
-
y01
1.5
2
2.5
3
3.5
4
0 1 2 3 4
u
˜u
(t2, y2)
(t3, y3)
(t2, u(t2))
-u(t2)
-
y2
-
y3
-
y1
y′= sin 10t
22 + 1y
f(t, r) = sin 10t
22 + 1r
h= 1, T = 4, tn=n
y3=y2+h f(t2, y2)
=y2+h˜u′(t2)
Construction de y3
1

Probl`eme Consid´erons un probl`eme de Cauchy
y′=f(t, y), y(0) = u0,
soit ula solution de ce probl`eme sur un intervalle [0, T ], soit h > 0et y0∈R, on d´efinit une
suite (yn)0≤n≤T/h par
yn+1 =yn+h f(tn, yn).
On appelle ˆu“la” fonction affine par morceaux qui, pour tout 0≤n≤T/h, prend la valeur yn
en tn.
Peut-on, sous des hypoth`eses raisonnables sur f, montrer que ˆuest une bonne approximation
de u?
Ce que l’on veut dire par “bonne approximation”, c’est que si y0est proche de u0et si hest
assez petit, on peut rendre petit l’´ecart
max
0≤n≤T/h |u(tn)−yn|
Dans la suite, on posera
un=u(tn).
2◦Exemples ´el´ementaires
(a) Exemple “trivial” : y′=f(t)
Supposons que f: [O, T ]→Rsoit une fonction continue. On s’int´eresse au probl`eme de Cauchy
∀t∈[0, T ], y′(t) = f(t), y(0) = 0.
Sa solution est ´evidemment t7→ Rt
0f... La m´ethode d’Euler avec y0= 0 donne :
yn+1 =yn+hf(tn),
si bien que
yn=h
n
X
k=0
f(kh).
Pour N∈N∗et h=T/N, on voit que
yN=1
N
N−1
X
k=0
fkT
N,vu comme approximation de ZT
0
f(t) dt.
Ainsi, dans ce cas, la m´ethode d’Euler n’est autre que la m´ethode des rectangles : on sait
qu’elle converge toujours, et la convergence est en 1/n si fest C1.
Noter que la convergence est assez lente : les m´ethodes des trap`ezes et du point m´edian donne
beaucoup mieux sans plus de calcul, et la preuve de la convergence est plutˆot plus simple...
(b) L’exemple canonique : le cas lin´eaire y′=ay
Attention ! Il est indispensable de citer cet exemple.
Soit a∈R, on s’int´eresse au probl`eme de Cauchy :
y′=ay, y(0) = 1.
Dans les notations pr´ec´edentes, on prend f(t, y) = ay. On obtient dans ce cas
yn+1 =yn+h ayn= (1 + ah)yn,
2

d’o`u :
yn= (1 + ah)n.
Si on fixe N∈N∗et h=T/N, on obtient pour approximation de u(tN) = exp(aT ) la valeur :
yN=1 + aT
NN
.
On reconnaˆıt une suite qui tend fort classiquement vers exp(aT ). Mais, dans l’esprit du pro-
gramme de terminale S, et `a titre d’exemple pour le cas g´en´eral, on veut montrer a priori que
la m´ethode d’Euler converge bien : c’est ce que fait le th´eor`eme du paragraphe suivant.
(c) Plus original : sch´ema d’Euler implicite pour y′=ay
Id´ee : Au lieu du d´eveloppement de Taylor u(t+h) = u(t) + hu′(t) + o(h) qui fondait la
m´ethode pr´ec´edente, on peut aussi bien partir de u(t+h) = u(t)+hu′(t+h)+o(h). En d’autres
termes, on veut poser :
yn+1 =yn+h f(tn+1, yn+1).
Ceci est une ´equation en yn+1, d’o`u le nom de “sch´ema implicite”. On peut montrer qu’elle
a une unique solution si fest “assez r´eguli`ere” et hassez petit. On va ici se contenter d’un
exemple.
Exemple : Reprenons, pour a∈R, le probl`eme de Cauchy lin´eaire
y′=ay, y(0) = 1.
On obtient dans ce cas
yn+1 =yn+h ayn+1,ou encore (1 −ah)yn+1 =yn,
d’o`u :
yn+1 = (1 −ah)−n.
Si on fixe N∈N∗et h=T/N, on obtient pour approximation de u(tN) = exp(aT ) la valeur :
yN=1−aT
N−N
.
Int´erˆet de la manipulation ? Il arrive que le sch´ema implicite soit plus stable que le sch´ema
explicite, i.e. que les erreurs de calculs se propagent moins vite. Pour de vraies explication,
voir par exemple le cours de Michelle Schatzman, Analyse num´erique, Dunod.
3◦Convergence de la m´ethode d’Euler
Th´eor`eme Soit Ωun ouvert de R2,f: Ω →Ret (0, u0)∈Ω. On suppose que fest de classe
C1et lipschitzienne par rapport `a la deuxi`eme variable, i.e. qu’il existe L > 0tel que
∀(t, r),(t, r′)∈Ω,|f(t, r)−f(t, r′)| ≤ |r−r′|.
On suppose enfin que le probl`eme de Cauchy
y′(t) = f(t, y(t)), y(0) = u0
a une solution u(n´ecessairement unique) sur un intervalle [0, T ], o`u T > 0.
On fixe h > 0et y0∈Rde sorte que (0, y0)∈Ω, et on pose :
yn+1 =yn+hf(tn, yn)o`u tn=nh.
Alors :
(i) si |y0−u0|et hsont assez petits, les ynsont bien d´efinis tant que 0≤n≤T/h ;
(ii) il existe C, D > 0ne d´ependant que de Ω,fet Ttel que :
∀0≤n≤T/h, |yn−f(tn)| ≤ C|y0−u0|+Dh.
3

(a) Premi`ere ´etape : majoration fondamentale.
Pour tout n, notons un=u(tn). On veut une relation liant yn+1 −un + 1 et yn−un. On ´ecrit
donc :
yn+1 −un+1 =yn+hf(yn)−un+1.
Id´ee Utiliser que ynest proche de un, donc ´ecrire yn−un; on voit apparaˆıtre un+1 −un=
u(tn+h)−u(tn), qui par un DL est proche de hu′(tn) = hf(tn, un), qui est proche de hf(tn, yn).
Conform´ement `a cette id´ee, on complique l’´ecriture :
yn+1 −u(tn+1) = yn−un
|{z }+un−un+1
|{z }
+hf(tn, yn)
=yn−un
|{z }+un−un+1 +hu′(tn)
|{z }
−hf(tn, un) + hf (tn, yn)
| {z }
.
Comme fest C1,uest C2,u′′ est born´ee1sur [0, T ] par un r´eel 2M > 0. On a donc, en vertu
de la formule de Taylor-Lagrange `a l’ordre 2 :
|un+1 −un−hu′(tn)|=|u(tn+1)−u(tn)−hu′(tn)| ≤ Mh2.
Par ailleurs, (yn) est born´ee et fest suppos´ee L-lipschitzienne, donc on a :
|hf(tn, yn)−hf(tn, un)| ≤ Lh|yn−un|.
Ainsi, on tire l’in´egalit´e fondamentale :
|yn+1 −un+1| ≤ (1 + Lh)|yn−un|+Mh2.
Ainsi, l’erreur commise |yn−un|satisfait une in´egalit´e qui, si c’´etait une ´egalit´e, en ferait une
suite arithm´etico-g´eom´etrique.
(b) Deuxi`eme ´etape : suite “pseudo arithm´etico-g´eom´etrique”.
Pour tout n, posons
δn= (1 + Lh)−n|yn−un|,
on a montr´e que :
δn+1 ≤δn+Mh2
(1 + Lh)n+1 .
On en tire en sommant t´el´escopiquement δn+1 −δn:
δn≤δ0+
n−1
X
k=0
Mh2
(1 + Lh)n+1 =δ0+Mh2
(1 + Lh)
1−1
(1+Lh)n
1−1
1+Lh
≤δ0+M
Lh.
Prenons N≥1 et h=T/N , alors, pour n≤N, on a :
|yn−un| ≤ (1 + Lh)nδn.
Avec n≤T/h et la concavit´e de x7→ ln(1 + x), il vient :
(1 + Lh)n≤(1 + Lh)T/h =eT
hln(1+Lh)≤eT
hLh =eLT ,
d’o`u, pour tout ntel que 0 ≤n≤T
h:
(§)|yn−un| ≤ eLT |y0−u0|+MeLT
Lh.
1Apart´e : Valeur de M. En d´erivant l’´equation de u, on a, pour t∈[0, T ] :
|u′′ (t)|=
˛
˛
˛
˛
∂f
∂x (t, u(t)) + u′(t)∂f
∂y (t, u(t))
˛
˛
˛
˛
≤
˛
˛
˛
˛
∂f
∂x (t, u(t))
˛
˛
˛
˛
+
˛
˛
˛
˛
f(t, u(t)) ∂f
∂y (t, u(t))
˛
˛
˛
˛
,
quantit´e major´ee par 2M= max[0,T ]˛
˛
∂f
∂x
˛
˛+ max[0,T ]|f|max[0,T ]
˛
˛
˛
∂f
∂y
˛
˛
˛. A pr´eciser dans le paragraphe 4◦.
4

4◦Bootstrap
On d´esigne ainsi, en anglais et en math´ematiques, l’activit´e consistant `a essayer de monter en
tirant tr`es fort vers le haut sur des sangles (straps) pass´ees sous les chaussures (boots).
La preuve du paragraphe 3◦n’est pas compl`ete : on calcule sans vergogne fen (tn, un) et
(tn, yn). Pour f(tn, un) = f(tn, u(tn)), c’est possible car l’hypoth`ese stipule que le probl`eme de
Cauchy a une solution sur [0, T ]. En revanche, rien ne garantit que (tn, yn) soit dans Ω ! Dans
l’exemple suivant, fest d´efinie uniquement sur le domaine Ω gris´e : comment peut-on calculer
y4, vu que f(t3, y3) n’est pas d´efini ?
u0
y0
y1
y2
y3
Ω
u
On peut s’en tirer de deux fa¸cons au moins. La premi`ere consiste `a prolonger fen une fonction
sur R2entier. Mais c’est p´enible `a faire en sorte que le prolongement soit toujours C1et
lipschitzien.
La deuxi`eme m´ethode consiste `a se tirer sur les bretelles... Comme [0, T ] est compact et u
continue, le graphe de uposs`ede un voisinage compact Kinclus dans Ω.2On donne enfin un
sens pr´ecis `a Men posant
M= max
K
∂f
∂x + max
K|f|max
K
∂f
∂y .
Ensuite, on choisit |y0−u0|et hassez petit pour que
∀n, ∀y∈[un−∆, un+ ∆],(tn, y)∈K,
avec ∆ = eLT |y0−u0|+M eLT
Lh.
Ω
Alors, la preuve de 3◦peut ˆetre compl´et´ee ainsi. On prouve par r´ecurrence que pour tout n,
ynest bien d´efini et satisfait l’in´egalit´e (§), la derni`ere de 3◦. C’est trivial pour n= 0, par les
2Construction : pour t∈[0, T ], on choisit η(t)>0 tel que la boule de centre (t, u(t)) et de rayon η(t) soit
contenue dans Ω. Or, par compacit´e de [0, T ] et continuit´e de u, le graphe de uest compact : on extrait un
nombre fini des boules pr´ec´edentes qui recouvrent le graphe ; la r´eunion de l’adh´erence de ces boules convient.
5
 6
6
1
/
6
100%