FICHES DE SYNTHESE - MECANISMES

POULIE-COURROIE
FONCTION
Transformer un mouvement de rotation en un mouvement de rotation d'axe parallèle.
PRINCIPE
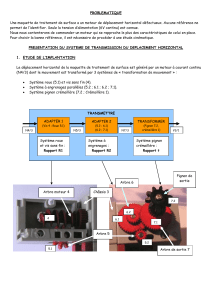
Ce type de transmission utilise un lien flexible (la courroie) tendu et enroulé sur deux poulies. Une de ces deux
poulies est motrice, l'autre est réceptrice. La transmission du mouvement se fait soit par adhérence (courroies plates)
soit par obstacle (courroies crantées).
REPRESENTATION - SCHEMATISATION
LOI ENTREE-SORTIE
En l'absence de glissement (ou du fait de l'entraînement par obstacle), on écrit que la vitesse relative au niveau du
contact poulies/courroie est nulle.
AVANTAGES - INCONVENIENTS
AVANTAGES
INCONVENIENTS par rapport aux PIGNONS-
CHAINE
• Transmission silencieuse
• Vitesse de transmission élevée (jusqu’à
100m/s pour les courroies plates)
• Grand entraxe possible entre les poulies
• Durée de vie limitée
• Couple transmissible faible pour les
courroies plates
• Tension initiale de la courroie
nécessaire pour garantir l’adhérence
Système poulies-courroie
Vitesse de rotation ω1
Vitesse de rotation
ω2
ω
2
ω
1
=
Z
1
Z
2
ou
ω
2
ω
1
=
R
1
R
2
Poulie motrice
Poulie réceptrice
R2
R1
Brin tendu
Brin mou

CHAÎNES
FONCTION
Transformer un mouvement de rotation en un mouvement de rotation d'axe parallèle.
PRINCIPE
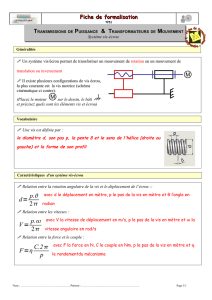
Ce type de transmission utilise une transmission par obstacle à l’aide d’un lien articulé appelé chaine. Une chaîne est
un lien déformable constitué de maillons articulés entre eux. La chaîne engrène sur des roues dentées que l'on
désigne, comme dans un engrenage, sous les termes de pignon (la plus petite) et de roue (la plus grande).
Les pignons et les chaînes peuvent être simples ou multiples.
Les chaînes sont souvent équipées de maillons rapides pour permettre la fermeture sans outillage spécifique.
REPRESENTATION - SCHEMATISATION
LOI ENTREE-SORTIE
Du fait de l'entraînement par obstacle, on écrit que la vitesse relative au niveau du contact pignon/chaîne est nulle.
AVANTAGES
AVANTAGES
INCONVENIENTS par rapport aux POULIES-
COUROIE
• Longue durée de vie
• Entrainement de plusieurs arbres
récepteurs en même temps
• Vitesses de transmission relativement
basses (13 à 20 m/s)
• Supportent des conditions de travail
plus rudes que les poulies courroies
• puissances transmises importantes
• rendement élevé (supérieur à 95%)
• aptitude à supporter des
environnements sévères
• pour les entraxes courts, coût limité par
rapport à un engrenage
• Plus bruyantes
• Vitesses de rotation plus faibles
• Lubrification nécessaire
Remarque
: les chaînes ont en standard un nombre
de dents pair. Il est conseillé de choisir pour les
pignons des nombres de dents impairs afin qu'un
maillon puisse rencontrer au cours du fonctionnement
l'ensemble des dents des pignons, garantissant ainsi
une répartition de l'usure sur tous les éléments de la
transmission.
Pignon
Chaîne
Système pignon - chaînes
Vitesse de rotation ω1
Vitesse de rotation ω2
ω
2
ω
1
=
Z
1
Z
2
ou
ω
2
ω
1
=
R
1
R
2
Pignon (Z1)
Roue (Z2)

ENGRENAGES CYLINDRIQUES DROITS
FONCTION
Transformer un mouvement de rotation en un mouvement de rotation d'axe parallèle.
PRINCIPE
La transmission de puissance au sein d'un engrenage s'effectue par obstacle, grâce au contact entre les dents dont
sont munis respectivement le pignon et la roue. Ces dispositifs permettent la transmission de couples importants.
REPRESENTATION - SCHEMATISATION
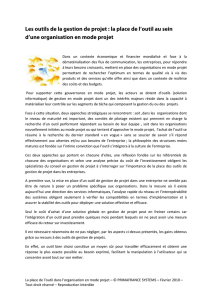
Engrenage extérieur Engrenage intérieur
LOI ENTREE-SORTIE
Du fait de l'entraînement par obstacle, on écrit que la vitesse relative au niveau du cercle primitif est nulle.
DESCRIPTION
Un engrenage est constitué d'un pignon et d'une roue qui
engrènent l'un sur l'autre.
Les profils des dents d'engrenage sont des profils à
développante de cercle. Ils ont comme propriété de conserver
une direction de la normale au contact entre les dents
constante au cours du mouvement absence de vibration.
Pour assurer l’engrènement on doit faire en sorte que les dents d’une roue s’intercalent bien entre les dents de l’autre
roue ; le « PAS » doit être identique sur chacune des deux roues : P1 = P2
Soit Z1 le nombre de dents du pignon 1 et Z2 le nombre de dents de la roue 2
P1 = π.D1 / Z1 et P2 = π.D2 / Z2
Le rapport Pas/ π = m est appelé module de l'engrenage.
En exprimant la relation P1 = P2, on obtient l'égalité des modules.
Deux roues dentées engrènent l’une avec l’autre si et seulement si elles ont le même module.
Une roue d'engrenage peut entièrement être caractérisée par (le nombre de dents Z, le module m, la largeur b, le
matériau)
On déduit le diamètre primitif L'entraxe est donné par
Système engrenages cyl.
Vitesse de rotation ω
1
Vitesse de rotation ω
2
ω
2
ω
1
=
±Z
1
Z
2
ou
ω
2
ω
1
=
±R
1
R
2
Pignon (Z1)
(1)
(2)
(1)
(2)
Roue (Z2)
Pignon (Z1)
Couronne (Z2)
Cercles primitifs
Profils à développante de cercle
D = m.Z
a =
1
2.
m.(Z1+Z2)

ENGRENAGES PARTICULIERS
De nombreux mécanismes de transformation de mouvement sont basés sur le principe de l'engrenage.
ENGRENAGES CYLINDRIQUES HELICOÏDAUX
FONCTION
Transformer un mouvement de rotation en un mouvement de rotation d'axe parallèle.
PRINCIPE
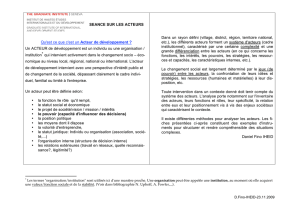
A la différence d'une denture droite, l'intersection du cylindre primitif et du flanc d'une dent n'est pas une droite mais
une hélice
REPRESENTATION - SCHEMATISATION
AVANTAGES
AVANTAGES
INCONVENIENTS
Du fait de l'hélice, la durée du contact entre une
dent et sa dent opposée est allongée.
Déformations sous charge des dentures plus
faibles que pour un engrenage droit
Transmission de couples importants, avec des
vibrations limitées lors de l'engrènement
Rendements restant importants : 0.95
L'inclinaison de l'hélice génère une composante
axiale de l'action de contact entre dentures.
Cette poussée axiale doit être prise en compte
dans la conception des paliers qui supportent la
roue.
ENGRENAGES CONIQUES
FONCTION
Transformer un mouvement de rotation en un mouvement de rotation d'axe perpendiculaire.
REPRESENTATION - SCHEMATISATION
PARTICULARITES
Du fait des angles des cônes, les actions de contact entre les dentures génèrent des charges axiales sur les arbres.
Les guidages en rotation des arbres dans les paliers devront encaisser ces efforts axiaux.
L'engrenage conique a l’avantage d’être réversible contrairement au système roue vis sans fin.
Ce système existe aussi avec une denture hélicoïdale.
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%