Automatique:
Systèmes Linéaires
Continus

Automatique : Systèmes linéaires
Sommaire:
Définitions
Notion de système en BO et en BF
Représentation d’un système linéaire
Réponse d’un système linéaire
Caractéristiques des systèmes asservis
Correction des systèmes asservis

Automatique : Systèmes linéaires
Définitions:
Un système dynamique est un procédé de nature quelconque (physique,
biologique, économique, ...) qui évolue sous l’action des signaux d’entrées et dont
l’évolution est caractérisée par des signaux de sorties.
Signal : Grandeur physique générée par un appareil ou traduite par un capteur
(température, vitesse, position etc.). On distingue :
Signal d’entrée : indépendant du système, il se décompose en
commandable (consigne) et non commandable (perturbations) .
Signal de sortie : dépendant du système et du signal d’entrée. ce signal doit
être observable pour évaluer les objectifs de commande.

Automatique : Systèmes linéaires
Définitions:
Automatique : c’est une science et une technique qui permet de maîtriser le
comportement d’un système (traduit par ses grandeurs de sortie), en agissant de
manière adéquate sur ses grandeurs d’entrée.
Il existe deux domaines d’intervention de l’automatique :
Dans les systèmes à événements discrets. On parle d’automatisme (séquence
d’actions dans le temps).
Exemples : les distributeurs automatiques, les ascenseurs…
Dans les systèmes continus pour asservir et/ou commander des grandeurs
physiques de façon précise et sans aide extérieure.
Exemples : la régulation de la vitesse de rotation d’un MCC, le pilotage
automatique d’un avion…

Automatique : Systèmes linéaires
Définitions:
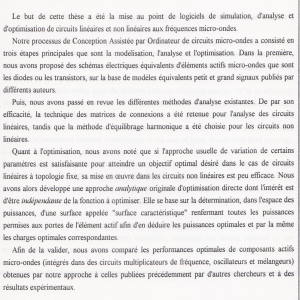
Classification des automatismes
On peut classer les automatismes selon la nature des signaux d'entrée et sortie
signaux discontinus
binaires plusieurs niveaux
systèmes logiques
combinatoires et
séquentiels
Méthodes:
algèbre de Boole
GRAFCET
Matérialisation de la
commande:
logique cablée,
automates
programmables
systèmes
échantillonnés
commande numérique
des systèmes continus
Méthodes:
équations de
récurrence,
transmittance en z
Matérialisation de la
commande:
calculateurs, PID
numériques
signaux continus
Système à temps continu
Régulations et asservissements
Méthodes:
équations différentielles, fonctions de
transfert, étude harmonique
Matérialisation de la commande:
comparateurs, sommateurs, intégrateurs,
réseaux correcteurs, régulateurs PID
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
1
/
94
100%