Word 2007

Chapitre 21 : Travail et énergie
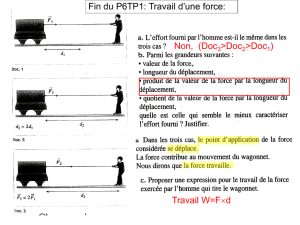
1. Travail d’une force
1.1. Définition
Définition
Le travail(1) WAB(
F
) d’une force
F
, lors d’un déplacement rectiligne de son point d’application du point A vers le
point B, est égal au produit scalaire de la force
F
par le vecteur déplacement
AB
:
WAB(
F
) =
F AB
=
F AB cos
=
F AB cos
Remarque : le travail d’une force est nul si
- son point d’application ne change pas au cours du temps ( A = B) ;
- sa direction est perpendiculaire à celle (direction) du déplacement (voir plus loin).
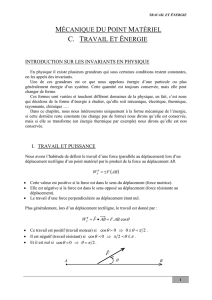
1.2. Forces conservatives ou non conservatives
- Soit une force
F
dont le point d’application se déplace entre les points A et B suivant la trajectoire (1)
rectiligne. Le travail de cette force sera donné par :
(1)
AB
W (F)
=
F AB
- Si maintenant le point d’application de cette force se déplace suivant une trajectoire (2) quelconque. Quel
sera le travail de
F
?
(2)
AB
W (F)
=
1dW (F)
n
i
=
1
F AM
+ … +
1
F M M
ii
+ … +
F M B
n
=
F
(
1
AM
+ … +
1
MM
ii
+ … +
MB
n
)
=
F AB
On constate donc que
(1) (2)
AB AB
W (F) W (F)
A RETENIR :
Lorsqu’une force est constante, son travail entre deux points A et B ne dépend pas du chemin suivi. On dit que la
force est conservative.
1
La lettre W, utilisée pour désigner le travail, vient du mot anglais « work ».
Mi
F
F
A
B
(1)
(2)
M1
Mi+1
Mn
= angle entre les vecteurs
F
et
AB
WAB (
F
) = travail (en J)
F = intensité de la force
F
(en N)
AB = déplacement (en m)
F
est une force constante sur
toute la durée du parcours
Rappel
u v w u v u w

Cas d’un solide en translation rectiligne :
Si toutes les forces sont constantes, alors :
AB
1W (F)
ii
n
i
=
11
A B 1
W (F )
+
22
A B 2
W (F )
+ … +
AB
W (F )
nn n
=
1 1 1
F A B
+
2 2 2
F A B
+ … +
F A B
n n n
= (
1
F
+
2
F
+ …+
Fn
)
AB
=
1F AB
ext
n
i
=
F AB
(avec
F
= résultante des forces extérieures appliquées au solide)
A RETENIR :
- Pour un solide en translation rectiligne, la somme des travaux des forces appliquées au solide est égale au
travail de leur résultante ;
- Si le solide est en translation rectiligne uniforme alors la résultante des forces est nulle (1ère loi de newton)
donc la somme des travaux des forces est nulle.
1.3. Travail moteur - Travail résistant
Le travail est une grandeur algébrique ( qui a un signe) :
F = intensité de la force > 0
WAB(
F
) =
F AB cos
AB = distance parcourue > 0
cos
est tel que : 1 < cos < 1
Si < 90° (angle aigu) alors la force
F
favorise le déplacement :
WAB(
F
) > 0, le travail est dit moteur
Si = 90° (angle droit) alors la force
F
s’oppose au déplacement :
WAB(
F
) = 0, le travail est dit nul
Si 90° < 180° (angle obtus) alors la force
F
s’oppose au déplacement :
WAB(
F
) < 0, le travail est dit résistif ou résistant
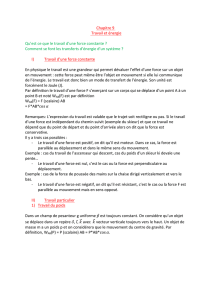
1.4. Cas du poids
Soit une balle qui roule le long d’une pente. Calculons le travail du poids de la
balle lorsque son centre d’inertie G passe d’un point A, d’altitude zA, à un point
B d’altitude zB en suivant une trajectoire quelconque.
La trajectoire n’étant pas rectiligne, calculons le travail du poids pour un
déplacement élémentaire, ainsi la portion de trajectoire correspondante sera
assimilable à un segment de droite.
Pour le déplacement élémentaire
1
AM
, la travail du poids s’écrit :
dW1(
P
) =
1
P AM
F
AB
zA
zB
g

Pour le déplacement
1
MM
ii
, la travail du poids s’écrit : dWi (
P
) =
1
P M M
ii
Pour le déplacement
MB
n
, la travail du poids s’écrit : dWn(
P
) =
P M B
n
Finalement, le travail du poids, lorsque le centre de gravité G va du point A au point B s’écrira :
WAB(
P
) =
1dW (P)
n
i
=
1
P AM
+ … +
1
P M M
ii
+ … +
P M B
n
=
P
(
1
AM
+ … +
1
MM
ii
+ … +
MB
n
)
=
P AB
Exprimons le produit scalaire
P AB
en fonction des coordonnées des deux vecteurs dans le repère orthonormé (O,
x, y) :
0
P 0
mg
et
BA
BA
BA
AB
xx
yy
zz
WAB(
P
) = mg (zA – zB)
Autre méthode :
Si zA > zB, le mobile descend et WAB(
P
) > 0 : le poids effectue un travail moteur.
Si zA < zB, le mobile s'élève et WAB(
P
) < 0 : le poids effectue un travail résistant.
Exercice : calculer le travail du poids du ballon de basket (m = 650 g) entre le point de lancer (altitude : 2,20 m) et le
panier (altitude : 3,05 m). Commenter le signe de ce résultat.
Réponse : W = – 5,42 J (travail résistant).
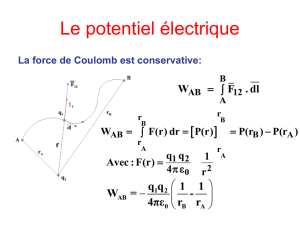
1.5. Cas d’une force électrique
Une particule de charge électrique q se déplace dans un champ
électrostatique uniforme
E
(ci-contre). Elle est soumise à une force électrique
F q E
e
constante (donc conservative) d’intensité Fe = |q| E.
Lors de son déplacement la force électrique exerce un travail donné par :
WAB(
Fe
) =
F AB F AB cos E AB cos
eeq
q en C
E en V.m–1
WAB(
P
) =
P AB P AB cos(P,AB)
=
P AB cos
Or
cos
=
BA
AB
zz
WAB(
P
) =
BA
P ( )zz
= mg (zB – zA) = mg (zA – zB)
zB
zA
AB
O
x
z
y
B
A
P
g
Rappel
Produit scalaire de
x
uy
z
par
'
'
'
x
vy
z
:
' ' 'u v xx yy zz
(dans un repère orthonormé)
C

WAB(
Fe
) =
F AB F AC F CB
e e e
Or
Fe
CB
F CB 0
e
Rappel (1ère S) : le condensateur plan
Caractéristiques du champ électrostatique
E
à l’intérieur d’un condensateur :
- Le champ est uniforme ;
- Direction : orthogonale (perpendiculaire) aux plaques ;
- Sens : de la plaque chargée positivement vers la plaque chargée
négativement ( du « vers le ») ;
- Sa valeur :
1
U tension entre les deux plaques (en V)
U
E d distance entre les deux plaques (en m)
d E intensité du champ (en V.m )
AC AB
UU
EAC AC
WAB(
Fe
) = |q| UAB
A RETENIR :
Le travail d’une force électrique
F
exercée sur une particule électrique de charge électrique q lors de son
déplacement de A à B dans un champ électrique uniforme est :
WAB(
F
) = q UAB
Exercice : L’électron-volt, de symbole eV, est une unité d’énergie égale à la valeur absolue du travail de la force
électrique exercée sur un électron lors d’un déplacement correspondant à une tension de 1 V. Calculer la valeur d’un
électron-volt en joules.
Réponse : 1 eV = e J = 1,60218 10−19 J
1.6. Cas d’une force de frottements
Lorsqu’un solide est en mouvement sur un support ou dans un fluide, il est soumis à une force de frottements
exercée par le support (frottements solides) ou par le fluide (frottements fluides). Cette force de frottements n’est
pas conservative : le système perd de l’énergie par transfert thermique vers l’extérieur, réalisée par le travail de la
force de frottements. Le travail de cette force sur un déplacement allant de A vers B dépend du chemin emprunté.
Frottements fluides
Frottements solides
f
s’oppose au déplacement du solide.
f
s’oppose au déplacement du solide.
Seule la réaction tangentielle exerce un
travail résistant.
Le travail de la force de frottements, d’intensité constante f, sur une trajectoire rectiligne est donné par :
WAB(
f
) =
ABf
= f AB cos = – f AB (car = 180°)
A RETENIR :
Une force de frottements est une force non conservative.
WAB(
Fe
) =
F AC q E AC
e
=|q| E AC

2. Puissance d’une force
Définition
Soit une force
F
qui effectue un travail WAB(
F
) pendant une durée t. La puissance Pmoyenne de cette force est le
quotient du travail par la durée mise pour l’effectuer :
AB
moyenne W (F)
Pt
Remarques :
- multiples du watt :
Le kilowatt : 1 kW = 103 W
Le mégawatt : 1 MW = 106 W
Le gigawatt: 1 GW = 109 W
- dans l’industrie automobile, on utilise le cheval-vapeur :
1 ch = 736 W
Cas d’un solide en translation rectiligne uniforme :
Si pendant un intervalle de temps dt = tB - tA très court une force
F
effectue, au cours d’un déplacement très court
dl
, un travail dW =
Fdl
très petit alors la puissance avec laquelle le travail de cette force est effectué s’appelle la
puissance instantanée :
instantanée dW (F)
Pdl
dt
Or
dl v dt
avec
v
= vitesse instantanée du point d’application de la force.
instantanée dW (F) F
P F F
dl dl dl v
dt dt dt
A RETENIR :
On appelle puissance instantanée (à l’instant t) d’une force
F
quelconque dont le point d’application à pour vecteur
vitesse instantanée
v
à l’instant t, le produit
Fv
.
3. Énergie cinétique (Rappel 1ère S)
3.1. Définition
Définition
On appelle énergie cinétique d’un mobile, l'énergie qu'il possède du fait de son mouvement. Pour un solide en
translation (tous les points ont le même vecteur vitesse). Elle se note Ec et s’exprime en Joule (symbol : J) :
2
cG
1
EV
2m
Remarque : l’énergie cinétique d’un solide en mouvement quelconque, formé de particules de masses m1, m2 , m3, …
dont les centres d’inertie ont pour vitesses V1, V2, V3, …s’écrira :
Ec =
2
11
1V
2m
+
2
22
1V
2m
+
2
33
1V
2m
+ …
On pourrait comparer l’énergie cinétique d’un objet à un réservoir qu’il vide ou remplit, au fil de sa trajectoire, en
fonction des forces qui lui sont appliquées :
- le réservoir est vide lorsque l’objet est immobile (vitesse nulle) ;
- le réservoir se remplit lorsque l’objet accélère, d’autant plus vite que l’objet est lourd.
Pmoyenne = puissance moyenne de la force
F
(en W)
WAB(
F
) = travail de la force
F
sur le trajet AB (en J)
t = durée du parcourt de la force
F
sur le trajet AB (en s)
Ec = énergie cinétique (en J)
m = masse du solide (en kg)
VG = vitesse du centre d’inertie du solide (en m.s-1)
 6
7
8
6
7
8
1
/
8
100%