Espace vectoriel euclidien

I Définition et notations
Un espace vectoriel euclidien
déf
un R-ev de dimension finie muni d’un produit scalaire.
Dans tout ce chapitre, E désigne un R-ev euclidien de dimension
2n
, le produit
scalaire est noté
. Pour
Eyx ,
, on note aussi :
-
yx
pour
),( yx
(parfois on rencontre aussi
y|x
)
-
2
x
pour
),( xx
-
x
pour
),( xx
(ainsi,
xx
est la norme associée au produit scalaire
, on
l’appelle la norme euclidienne)
-
yx
pour
0),( yx
Exemple :
n
R
muni du produit scalaire canonique : on parle de la structure euclidienne
canonique de
n
R
.
Remarque : Si E est un espace vectoriel euclidien, alors tout sous-espace vectoriel F de
E est muni naturellement d’une structure euclidienne, obtenue par restriction.
II Bases orthonormales
A) Généralités
Définition, proposition :
Une base orthonormale (ou orthonormée)
déf
une famille orthonormale de vecteurs
de E qui en forme une base = une famille orthonormale de n vecteurs de E (car une
famille orthonormale est libre.
Théorème (Schmidt) :
Soit
),...,( 21 n
uuu
une base quelconque de E.
Alors il existe une unique base orthonormale
),...,( 21 n
eee
telle que :
0,,1
),...,(Vect),...,(Vect,,1 2121
pp
pp
uenp
uuueeenp
On dit que
),...,( 21 n
eee
est la base orthonormale s’appuyant sur la base
),...,( 21 n
uuu
par le procédé d’orthonormalisation de Schmidt.
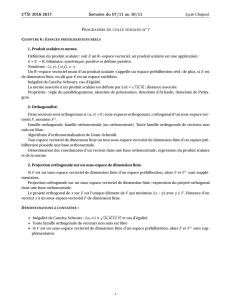
Préliminaire (graphique) :
i
j
1
e
2
e
2
u
1
u
),( ji : base orthonormée
),( 21 uu : base quelconque
: base orthonormée qui s’appuie dessus
),( 21 ee
Démonstration :
On montre par récurrence sur p que, pour tout
np ,1
, « on a une et une seule
manière de construire
p
e
».
- Il est évident qu’il y a une seule façon de construire
1
e
de sorte que :
)(Vect)(Vect 11 ue
(cela impose que
11 ue
, avec
0
car
0,0 11 ue
)
1
1 e
(cela impose alors que
1
1u
, ainsi
11 ue
)
0
11 ue
, donc
11 ue
.
Ainsi,
1
1
1u
u
e
. Réciproquement, ce vecteur convient bien
Espace vectoriel euclidien

- Soit
1,1 np
. Supposons
),...,( 21 p
eee
construit.
Montrons qu’il y a un et un seul choix de sorte que :
)1(),...,(Vect),...,(Vect 121121 pp uuueee
1
p
e
est orthogonal aux
)2(1, piei
)3(1
1 p
e
)4(0
11 pp ue
(1) impose que
1p
e
soit combinaison linéaire des
11, piui
pie
ip
i
piuu
1, des linéairen combinaiso
11, des linéairen combinaiso
et
0
car sinon
),...,(Vect),...,(Vect),...,(Vect 12121121 ppp uuuuuueee
et
1p
u
serait alors combinaison linéaire des
piui1,
.
Donc
p
iiipp eue 1
11
.
Et inversement, si
p
iiipp eue 1
11
, alors on a bien (1).
(2) impose que pour
0,,1 1 pj eepj
.
Or, pour
).(,,1 1
1
11 jjp
p
ijiijppj eueeeueepj
car on a
0 ji ee
si
ji
, 1 sinon, par hypothèse de récurrence.
Ainsi,
jpj eunj 1
,,1
Inversement, si cette condition est vérifiée, on a bien (2).
(3) impose que
1
1
p
e
, c'est-à-dire que
p
iiip eu 1
1
1
.
Donc
p
iiip eu 1
1
1
(
0
1
1
p
iiip eu
car sinon
),...,(Vect),...,(Vect 21211 ppp uuueeeu
)
Inversement, si on a cette valeur de
, on a bien (3).
(4) impose le choix de +, car
p
ipiipppp eeeuee 111111
.
Or,
0
11
p
ipii ee
car
1p
e
est orthogonal aux
piei1,
.
Donc
0
11
1
11
pppp euee
donc
0
.
Inversement, si
0
, on a bien (4).
Ce qui achève la récurrence.
Conséquences :
(1) Dans un espace vectoriel euclidien, il existe au moins une base orthonormale
(2) Toute famille orthonormale peut être complétée en une base orthonormale.
En effet :
Soit
),...,( 21 p
eee
une famille orthonormale. Comme elle est libre, on peut la
compléter en une base
),...,,...,( 121 npp eeeee
de E. Par le procédé d’orthonormalisation
de Schmidt, on obtient alors une base orthonormale
)',...','( 21 n
eee
. Mais, d’après le
théorème de Schmidt appliqué dans
),...,(Vect 21 n
eeeF
, on a
)',...'(),...( 11 pp eeee
.

B) Produit scalaire et base orthonormale
Soit
),...,( 21 n
eeeB
une base orthonormale de E.
Soit
Ex
, de composantes
),...,( 21 n
xxx
dans B, notons
n
x
x
x
X
2
1
.
Soit
Ey
, de composantes
),...,( 21 n
yyy
dans B, notons
n
y
y
y
Y
2
1
.
On identifie ici R et
)(
1,1 RM
pour ne pas charger les notations :
YXyxeyexeyexyx t
y
y
y
xxx
n
iii
nji jjii
n
jjj
n
iii
n
n)(( 2
1
21 )
1,1,11
Ainsi,
YXyxyx t
n
iii )(
1
.
Et, en particulier :
XXxxxx t
n
ii)(
1
22
Ainsi, l’application
n
iii
n
n
exxxx E
1
21 ),...,(:
R
B
, qui est un isomorphisme de R-ev,
est aussi un isomorphisme de R-ev euclidien *,
n
R
étant muni de sa structure
euclidienne canonique. (* C'est-à-dire que pour tout
vuvuvu n )()(,, BB
R
, en
plus des règles pour un R-ev).
Remarque :
Inversement, soit E un R-ev de dimension n,
),...,( 21 n
uuuB
une base de E.
Alors il existe un et un seul produit scalaire tel que B soit orthonormale dans le
R-ev euclidien E muni de ce produit scalaire.
En effet, c’est l’application
définie par :
Pour tout
Eyx ,
, de composantes
),...,( 21 n
xxx
et
),...,( 21 n
yyy
dans B,
n
iii yxyx 1
),(
.
Exemple :
2
R
, muni de la base
])1,1(,)2,1([
21 uu
. On note
),( ji
la base canonique de
2
R
.
Soit
2
21 ),( R xxx
.
Alors
22111221212121 )2()()()2( uxxuxxuuxuuxjxixx
.
Ainsi,
),( ji
est une base orthonormale pour le produit scalaire naturel, mais
),( 21 uu
n’en est pas une pour ce produit scalaire ; en revanche, c’en est une pour le
produit scalaire
12211122
21211212
2121
2
3352 )2)(2())(()),(),,((
:
yxyxyxyx yyxxyyxxyyyxxx
RR
.
III Orthogonal d’un sous-espace vectoriel, projecteurs et symétries orthogonaux
A) Orthogonal d’un sous-espace vectoriel (rappel)
Soit F un sous-espace vectoriel de E.

On définit
0,,
yxFyExF
.
Alors
F
est un sous-espace vectoriel de E, et
FFE
.
Démonstration :
Déjà, c’est un sous-espace vectoriel de E (vu dans le chapitre précédent).
Si
0F
, alors
EF
, et on a bien
FFE
.
Si
0F
. On note p la dimension de F ; ainsi,
np 1
.
Soit
),...,( 21 p
eee
une base orthonormale de F.
On la complète en une base orthonormale
),...,( 21 n
eeeB
de E. Soit alors
Ex
,
de composantes
),...,( 21 n
xxx
dans B.
On a alors les équivalences :
0,,10,,1
0,,...,
0,
1
11
21
1
jj
n
iii
p
iii
n
iiip
n
iii
xpjeexpj
eyexyyy
yexFyFx
R
L’avant-dernière équivalence se justifie dans un sens en prenant, pour
pj ,1
1
j
y
et
0,\,1 i
yjpi
, et dans l’autre sens par linéarité de la deuxième
variable.
Donc
),...,(Vect 21 npp eeeF
, donc
F
est bien supplémentaire de F dans E.
Conséquence :
Dans un espace euclidien,
FF
)(
.
En effet, on a déjà vu que
)(FF
. De plus, en notant
Fp dim
, on a :
pnF
)dim(
, donc
FppnnF dim)())dim((
. D’où l’égalité.
B) Projecteur orthogonal
Définition :
Soit F un sous-espace vectoriel de E.
Le projecteur orthogonal sur F
déf
le projecteur sur F selon
F
.
Pour
Ex
, p le projecteur orthogonal sur F, alors
)(xp
est appelée la projection
orthogonale de x sur F.
F
x
)(xp
F
Ainsi,
)(xp
est l’unique élément de F tel que x s’écrive :
uxpx )(
, où
Fu
. (car
FFE
, et
FxpEx )(,
)
Autrement dit,
)(xp
est l’unique élément de F tel que
Fxpx )(
. Ainsi, pour
Ey
,
Fyx
Fy
xpy )(
.
C) Distance d’un élément à un sous-espace vectoriel
Définition :

Soit A une partie non vide E et soit
Ex
. Alors la distance de x à A, notée
),( Axd
, est :
),(inf),( déf yxdAxd Ay
.
La borne inférieure existe bien, car
Ayyxd ),,(
est non vide (car A est non
vide), et minorée (par 0).
(Définition : frontière = adhérence d’une partie, privée de l’intérieur)
Théorème :
Soit F un sous-espace vectoriel de E, soit p le projecteur orthogonal sur F.
Soit
Ex
0
.
Alors
)( 0
xp
est l’unique élément de F tel que
)(),( 000 xpxFxd
. Autrement
dit, la distance de
0
x
est atteinte, en un et un seul point, qui n’est autre que
)( 0
xp
.
Démonstration :
Soit
Fy
.
Alors
2
000
2
0)()( xxpxpyxy
.
Or,
Fxpy )( 0
car
FxpFy )(, 0
; et
Fxxp 00 )(
par définition de p.
Donc
000 )()( xxpxpy
. Ainsi, d’après le théorème de Pythagore :
2
00
2
0
2
000
2
0)()()()( xxpxpyxxpxpyxy
D’où
000 )( xxpxy
, et il n’y a égalité que si
)( 0
xpy
(car sinon
0)()( 2
0
2
00
2
0 xpyxxpxy
)
D) Symétries orthogonales
Ce sont les symétries par rapport à un sous-espace vectoriel F, selon
F
.
Autrement dit :
La symétrie orthogonale par rapport à F
déf
l’application
''''''
:xxxxx EFFEf
.
F
x
F
''x
''x
'x
)(xf
Remarque :
xxpxf )(2)(
, où p est la projection orthogonale sur F.
Proposition :
Soit f une symétrie sur E. On a l’équivalence :
f est une symétrie orthogonale
xxfx )(
.
Symétrie quelconque :
F
x
)(xf
Démonstration :
Soit f une symétrie par rapport à F selon G. (où G est tel que
GFE
).
Soit
Ex
. Alors
G
G
F
Fxxx
, et
GF xxxf )(
.
Donc
222 2GGFF xxxxx
et
222 2)( GGFF xxxxxf
.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%