2012 Physique PSI Impact d’un bolide avec la Terre

Centrale Physique PSI 2012 — Énoncé 1/8
2012
Physique
PSI
4heuresCalculatricesautorisées
Impactd’unbolideavec laTerre
L’objetde ce problème,constituédequatrepartiesindépendantes,estd’étudierl’impactd’un bolide(astéroïde
ou comète)avec laTerre etcertainesconséquencesquien découlent.Danstoutl’énoncé,on supposeraquele
bolidenepossèdeaucun mouvementderotation propredans son référentielbarycentrique.
Certainesdonnéesnumériques sontrassembléesàlafin du sujet.
ICollision entreun bolide etlaTerre
I.A–VitesseorbitaledelaTerre
OnseplacedansleréférentieldeKepler,supposégaliléen,dontl’origine estconfondueavec le centredu Soleil
etdontlesaxes sontdirigésverstroisétoilesfixestrèséloignées.La Terre etleSoleil présententunesymétrie
sphérique.La massedelaTerre estnégligeabledevantcelledu Soleil. La Terredécritapproximativementune
orbite circulairederayon R0=1,5×1011 mautourdu Soleil eton exclut touteinfluence desautresplanètes
ou objetscélestes.
I.A.1) Qu’est-ce qu’un référentielgaliléen?
I.A.2) Quelestl’intérêtde considérerl’hypothèsedesymétriesphériquepourlaTerre etleSoleil ?Quelles
simplificationsdécoulentdu faitquelamassedelaTerre estnégligeabledevantcelledu Soleil lorsdel’étude
du systèmeisolé constituépar cesdeuxcorps?Desréponses succinctes sontattendues.
I.A.3) MontrerquelemouvementcirculairedelaTerre estuniforme.ExprimerlavitesseorbitaledelaTerre,
notée vT,enfonction delaconstantegravitationnelleG,delamassedu soleil MSetdeR0.Fairel’application
numérique.
I.B–Vitessed’impactdubolide
LesastéroïdesquipeuventapprocherlaTerrepossèdentdesvitesses,dansleréférentieldeKepler,del’ordre
de30 km·s−1.Onqualifieracesobjetsdebolides.La Terre estassimilée àunesphèrehomogènederayon
RT=6,4×106m.Onrappellequeleréférentielgéocentriqueapouroriginele centreOdelaTerre etqueses
axes sontparallèlesàceuxdu référentieldeKepler.
I.B.1) On notevblavitessed’un bolidedansleréférentieldeKepleretvrsavitessedansleréférentiel
géocentrique(vitesserelativepar rapportàlaTerre).Donnerun encadrementdelavitessevrenfonction devb
etvT.Fairel’application numériquepourlesastéroïdes.
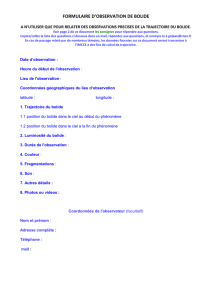
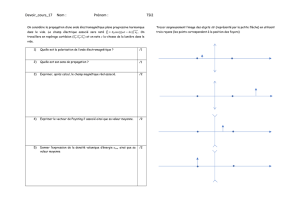
Ontravailledansleréférentielgéocentriquesupposégaliléen.Le bolide,assimiléàun pointmatérielpourle
moment,possèdeunemassembtrèsnégligeabledevantcelledelaTerre.Le bolide,depuisunerégion très
éloignée delaTerre,arriveavec unevitesseþvr=vrþexetsatrajectoire estportée par unedroitesituée àune
distance bdu centredelaTerre(figure1).Le système{Terre+bolide}estconsidéré commeisolé.
x
y
b
þvr
O
M0
A
Figure1Trajectoiredu bolidedansle champgravitationneldelaTerre
I.B.2) Rappelerl’expression del’énergiemécaniqueEmdu bolide en un pointquelconquedesatrajectoire
enfonction desavitessev,desadistance rau centredelaTerre,desamassemb,delamassedelaTerreMT
Téléchargé gratuitement sur www.Doc-Solus.fr .

Centrale Physique PSI 2012 — Énoncé 2/8
etdelaconstantegravitationnelleG.Préciserlanaturedelatrajectoiredu bolidedansle champgravitationnel
delaTerre.
I.B.3) On noteAlepointdelatrajectoireleplusprochedelaTerre.dmin=OAreprésentedoncladistance
minimale entrele centredelaTerre etlebolide.Rappelonsqu’ence point, lavitessedu bolide,notée þvA,est
perpendiculaireau vecteur−→
OA.
a)Montrerquelemomentcinétiquedu bolide estconservéau coursdeson mouvement.En déduireune
relation simple entrevr,b,dminetvA=||þvA||.
b) Déterminerl’expression dedminenfonction deG,MT,vretb.
c) Pourquelebolide entre encollision avec laTerre,montrerqueleparamètred’impactbdoitêtreinférieur
àunevaleurmaximale,notée bmax,quel’on exprimeraenfonction deRT,G,MTetvr.
I.B.4) a)Encas de collision,montrerquel’expression delavitesseau momentdel’impact,notée vi,
peutsemettresouslaforme
vi=ñv2
r+v2
l
où l’on exprimeralavitessevlenfonction deG,MTetRT.Calculerlavaleurnumériquedelavitessevlet
précisersasignification physique.
b) Quelestl’intervallenumériquedesvaleurspossiblesdelavitessed’impactvid’un astéroïdeavec laTerre?
I.C–Énergie cinétiquedubolide
Le bolide estàprésentmodélisépar unesphèrepleinederayon rb=80 metdemassevolumiqueρb=
2,5×103kg·m−3(matériau rocheux).
I.C.1) Calculerl’énergie cinétiquedu bolidepourunevitessed’impactvi=20 km·s−1.
I.C.2) Unetonned’explosifdeTNT (trinitrotoluène)libèreune énergiede4,18 ×109J.Par ailleurs,une
kilotonnedeTNT représente103tonnesdeTNT etunemégatonnereprésente106tonnesdeTNT.Exprimer
l’énergie cinétiqueprécédentedu bolide entermed’équivalentenTNT.Comparercette énergieàlabombe
atomiqued’Hiroshima(6août1945) quiaproduitune énergie équivalenteàl’explosion de15 kilotonnesdeTNT.
Cette comparaison avec unebombeatomiqueabien un senscar lebolidelibèreson énergie cinétique,au moment
del’impactavec lesol,souslaformed’une explosion.
II Traversée del’atmosphèrepar lebolide–Cratèred’impact
Danscettepartie,on s’intéresseàlatraversée del’atmosphèreterrestrepar lebolideprécédent (sphèrepleine
derayon rb=80 metdemassevolumiqueρb=2,5×103kg·m−3).La courburelocaledelaTerre estnégligée
eton confondsasurface,danslarégion del’impact,avec son plan tangent.On utiliseunebaseorthonormée
directe(þex,þey,þez)etun pointdel’espace estrepérépar sescoordonnéescartésiennes(x,y,z).Onseplace
dansleréférentielterrestre,supposégaliléen.Le champ depesanteur,dirigé suivantlaverticaledescendante est
supposéuniforme:þg=−gþezavec g=9,8m·s−2.
II.A–Atmosphèreisotherme
L’atmosphèreterrestre estsupposée êtreàl’équilibreisothermedetempératureuniformeT0.L’airestassimilé
àun mélange degaz parfaits.ρ(z)etP(z)représententrespectivementlamassevolumique etlapression de
l’airàl’altitudez.Cesgrandeurs sontnotéesρ0etP0au niveau du sol (z=0).
II.A.1) ExprimerP(z)enfonction deρ(z),T0,delaconstantedesgaz parfaitsRetdelamassemolairede
l’airMair.
II.A.2) Montrer,en utilisantl’équilibrehydrostatique,quelamassevolumiqueρ(z)vérifielaloi
ρ(z)=ρ0exp3−z
Ha4
où l’on exprimeralahauteurcaractéristiqueHaenfonction deMair,T0,Retg.
II.A.3) Applicationsnumériques.Calculerlamassevolumiquedel’airρ0au niveau du sol etlahauteurHa.
Données:P0=1,0×105PaetT0=290 K.
II.B–Freinage atmosphérique
Le bolide entredansl’atmosphèreavec unevitessevi=20 km·s−1.Durantlatraversée del’atmosphère, il est
soumisàson poidsetàlaforce detraînée denormeFt=1
2Cρπr2
bv2où C=2estle coefficientdetraînée,ρla
massevolumiquedel’airetvlavitesseinstantanée du bolide.Onsupposequelebolide conservesamasseau
coursdesachute.
II.B.1) Pourlescalculsd’ordredegrandeurde cettequestion,on utiliseraρ0commevaleurcaractéristique
delamassevolumiquedel’air.
a)Justifier,encalculantlenombredeReynoldsassociéàl’écoulementdel’airautourdu bolide, le choix
d’uneloi quadratique envitessepourl’expression delaforce detraînée.Donnée :viscositédynamiquedel’air
ηa=1,8×10−5Pa·s.
Téléchargé gratuitement sur www.Doc-Solus.fr .

Centrale Physique PSI 2012 — Énoncé 3/8
b) Montrerqu’entermed’ordresdegrandeur, lepoidsdu bolide estnégligeabledevantlaforce detraînée.
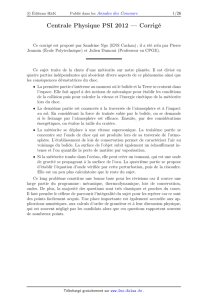
II.B.2) Danscesconditions, il estpossibledemodéliserlatrajectoiredu bolidedansl’atmosphèrepar une
droiteinclinée d’un angleθpar rapportàlaverticaleþez.Onchoisitlesaxesdu repèredetellemanièrequela
trajectoiresesituedansleplan y=0(figure2):
x
z
O
θ
trajectoire
Figure2Trajectoiredu bolidedansl’atmosphèreterrestre
a)Exprimerl’accélération du bolide,a=dv/dt,enfonction deC,ρb,rb,ρ(z)(massevolumiquedel’airà
l’altitudez)etv(t)(vitesseinstantanée du bolide).
b) Exprimerdv/dzenfonction del’accélération a=dv/dtetdelacomposanteverticaledelavitessedu
bolidevz=dz/dt.Enremarquantquevz=−vcos θ,exprimerdv/dzenfonction deC,ρb,rb,ρ(z),vetθ.
c) En utilisantlacondition limz→+∞v(z)=vi(vitessed’entrée dansl’atmosphère),déterminerlaloi de
variation delavitessedu bolide enfonction del’altitudez:v=f(z).
II.B.3) Applicationsnumériques
On poseθ=45◦.
a)Calculerlavitessedu bolidelorsqu’il atteintlesol (z=0).L’atmosphèrefreine-t-elle efficacementce
bolide?
b) Calculerl’énergiedissipée par lebolidedansl’atmosphère.La compareravec l’énergie cinétiquedu bolide
àl’entrée del’atmosphère.
II.C–Cratèred’impacttransitoire
Entrelemomentoù lebolidetouchelesol etceluioù il eststoppé, il nes’écoulequequelquesfractionsdeseconde
pendantlesquelles son énergie cinétique estconvertie enénergieinterne.Cette énergieinternevaporiselebolide
etdesmatériauxdelacroûteterrestre,amenantl’ensembleàunetempératuredel’ordrede10 ×104Ksous
unepression deplusieursmégabars.Cettepression est très supérieureàce quepeuventsupporterlesmatériaux
delacroûteterrestre.Puisquerien nepeutcontenirlavapeurproduite, il seproduitune énorme explosion.
Cette explosion provoqueuneintenseondede chocquisepropage àpartirdelazoned’impacten pulvérisant
les stratesrocheusesetenéjectantlesmatériauxen partiesouslaformed’un magmaultra-chaud.L’intensité
del’ondede chocs’atténuantau coursdesapropagation,ellefinitpar setransformeren une«simpleonde
sismique».La phased’excavation s’achèvepar laformation d’un cratèretransitoirequiévoluepar lasuitevers
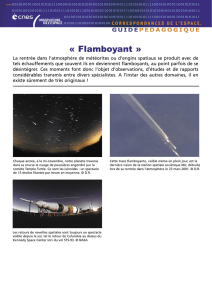
le cratèredéfinitif.L’objectifde cettepartie estd’estimerlediamètreDdu cratèreprovisoiremodélisépar une
hémisphère(demi-sphèredelafigure3(b)).Pourcela, on considèrequel’énergie cinétiquedu bolidesert,en
premièreapproximation,àfracturerlesmatériauxetàleséjecteren dehorsdu cratère.
croûteterrestre
G0
δ
D
croûteterrestre
G0
D
(a) demi-sphèrepleinedediamètreD(b)cratèreprovisoire
Figure3
II.C.1) Calculernumériquementl’énergie cinétiquemassiquedu bolide.La compareravec l’enthalpiemas-
siquedevaporisation desmatériauxrocheuxhv≃8MJ·kg−1.
II.C.2) a)L’énergieservantàfracturerlesmatériauxdelacroûte,notée Ecoh(énergiede cohésion),
peutêtre estimée enmultipliantlevolumedelademi-sphèrepleinedediamètreDdelafigure3(a) par une
grandeurYcaractéristiquedelarésistance desmatériauxconstitutifs.Quelle estl’unitédeY?
Téléchargé gratuitement sur www.Doc-Solus.fr .

Centrale Physique PSI 2012 — Énoncé 4/8
b) Le barycentreG0delademi-sphèrepleine(figure3(a))setrouveàlaprofondeurδ=3D
16 .Onestimeque
l’énergieEgnécessairepouréjecterlesmatériauxestégaleau travaildu poidspouramenerce barycentreau
niveau du sol.ExprimerEgenfonction delamassevolumiquedelacroûteterrestreρc,du diamètreDetdu
champ depesanteurg.
c) Établirl’équation permettantdedéterminerlediamètreD.
d)Donnéespourlacroûteterrestre:Y=3,0×107SIetρc=2,7×103kg·m−3.Résoudredemanière
numériqueou graphiquel’équation précédente.On pourralimiterlarecherchedeDàl’intervalle[2km,8km].
Comparerlediamètredu cratèreprovisoireavec celuidu bolide.
III Thermodynamiquedelatraversée del’atmosphère
Cettepartieabordelesaspectsthermodynamiquesdelatraversée del’atmosphèrepar lebolidemodélisépar
unesphèrepleinederayon rb=80 metdemassevolumiqueρb=2,5×103kg·m−3.Lesconséquencesdela
dissipation énergétiquedansl’atmosphèresontimportantes:
−uneondede chocsedéveloppeàl’avantdu bolideavec échauffementadiabatiqueintensedel’airquitraverse
cetteondede choc;
−lasurfacedu bolide estchauffée par radiation du gaz chaudqui l’entoure,produisantunefusion etune
vaporisation du matériau àsasurface;
−lamatièreperduepar lebolidefinitpar transférerson énergieàl’atmosphèresousformed’énergieinterne.
III.A–Puissancedissipée
Calculerlapuissance dissipée par laforce detraînée Ft=1
2Cρπr2
bv2au voisinage du sol.Comparercette
puissance àcelleproduitepar une centralenucléaire électriquemoyennequiestdel’ordrede1GW.
Données:coefficientdetraînée C=2,massevolumiquedel’airρ=1,2kg·m−3etvitessedu bolidev=
20 km·s−1.
III.B–Vitessedusondans l’air
L’airestconsidéré commeun gaz parfait,non visqueux,dontlerapportdescapacitésthermiquesγ=Cp/Cvest
constant.Àl’équilibre,samassevolumique,sapression etsatempératuresontnotéesrespectivementρe,Peet
Te(grandeursuniformes).La propagation d’uneondeacoustiquereprésenteuneperturbation de cetéquilibre.
On noteþu(M,t)le champ desvitessesassociéàl’ondeacoustique eton posepourleschampsdepression etde
massevolumique
;p(M,t)=Pe+pa(M,t)avec |pa(M,t)|≪Pe
ρ(M,t)=ρe+ρa(M,t)avec |ρa(M,t)|≪ρe
La propagation del’ondesonores’accompagned’une évolution isentropiquedel’air,caractérisée par le coefficient
de compressibilitéisentropiqueχS=1
ρ1∂ρ
∂p2S.Onseplacedansle cadredel’approximation acoustique eton
néglige l’effetdelapesanteursurlapropagation del’onde.
III.B.1) Quesignifiel’approximation acoustique?Établir,àpartirdel’équation localedelaconservation
delamasse etdel’équation d’Euler,deuxéquationsdifférentiellesreliantlesgrandeursρe,ρa(M,t),pa(M,t)
etþu(M,t).
III.B.2) Pourquellesraisonspeut-on considérerquel’évolution del’airestisentropique?ExprimerχSen
fonction deρe,ρaetpa.Par ailleurs,montrerquel’on aégalementχS≃1
γPe.
III.B.3) a)Établiretnommerl’équation depropagation vérifiée par lapression acoustiquepa(M,t).
Montrerquelavitessedu son,notée ca,peutsemettresouslaforme
ca=óγPe
ρe
b) Exprimerégalementlavitessedu son enfonction deγ,R(constantedesgaz parfaits),Mair(massemolaire
del’air)etTe.Fairel’application numérique.Données:Te=290 Ketγ=7/5.
III.C–Loisde conservationdel’écoulement àtraversl’ondede choc
Onsupposeàprésentquelebolidetraversel’atmosphèreàlavitesse constantev=20 km·s−1eton seplace
dansun référentielqui luiestlié.Dansce référentiel, suffisammentloin du bolide,dansunerégion notée (1),
l’écoulementdel’airestnon perturbé etil estcaractérisépar unevitessetrèsélevée v1=v,unepression P1,
unemassevolumiqueρ1,unetempératureT1,une énergieinternemassiqueu1etune enthalpiemassiqueh1.
Toutescesgrandeurs sontuniformes.
III.C.1) CalculernumériquementlenombredeMach danslarégion (1) :M1=v1/c1où c1estlavitesse
du son danscetterégion.Données:T1=290 Ketγ=7/5.CommeM1>5, l’écoulementestqualifié
d’hypersonique.
Téléchargé gratuitement sur www.Doc-Solus.fr .

Centrale Physique PSI 2012 — Énoncé 5/8
Àl’avantdu bolide,maisprochedesasurface, lapression, lamassevolumique etlatempératureaugmentent
énormémentàcausedel’accumulation dematière.Dufaitdelaconservation du débitmassique, lavitesse
del’écoulementdiminue ens’approchantdelasurfacedu bolide etl’écoulementfinitpar devenirsubsonique.
Ilexistedoncune zonedetransition étroite,appelée ondede choc,où legaz subit,demanièreadiabatique,
d’importantesmodificationsdesapression,desamassevolumique etdesavitesse.La région enamontde cette
zonedetransition correspondàl’écoulementhypersonique(1) etlarégion enaval,appelée région du gaz choqué,
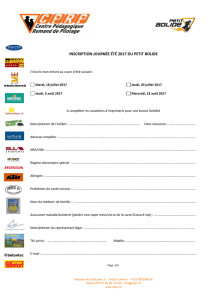
correspondàun écoulementsubsonique.Afin desimplifierl’étudede cetteondede choc,on modéliselazone
detransition par un plan perpendiculaireauxécoulements,séparantl’espace en deuxrégionsbien distinctes
(figure4):
−larégion non perturbée (1) décriteprécédemment (écoulementhypersonique);
−larégion du gaz choqué(2) caractérisée par unevitessesubsoniquev2,unepression P2,unemassevolumique
ρ2,unetempératureT2,une énergieinternemassiqueu2etune enthalpiemassiqueh2.Toutescesgrandeurs
sontuniformesdanslarégion du gaz choqué.
Insistons surlefaitquel’ondede choc estfixedansleréférentield’étude etquelesécoulements sontstationnaires.
L’objectifdesquestionsquisuiventestd’établirdesloisde conservation pourl’airquitraversedemanière
adiabatiquel’ondede choc.On poseγ1=γ2=γ=7/5pourlerapportdescapacitésthermiquesdesgaz,
supposésparfaits,danslesrégions(1) et (2).On néglige leseffetsdelapesanteursurl’écoulement.
S
région (1) région (2)
cylindreimaginaireondede choc
v1
P1
T1
ρ1
u1
h1
v2
P2
T2
ρ2
u2
h2
Figure4Modélisation del’ondede choc
III.C.2) Onconsidèrelasurfacede contrôle constituée d’un cylindrederévolution imaginaire,desection
droited’aireS,centré en un pointdu plan del’ondede choc etdontlesgénératrices sontperpendiculairesà
ce plan (figure4).Onenvisage lesystèmeouvertetfixeΣconstituéàchaqueinstantdu gaz àl’intérieurdu
cylindreprécédent.Eneffectuantun bilan demassesurun systèmeferméΣ∗quel’on définiraprécisément,
établirunerelation,notée (R1),entreρ1,ρ2,v1etv2.
III.C.3) Eneffectuantun bilan dequantitédemouvement,établirunerelation,notée (R2),entreP1,P2,
ρ1,ρ2,v1etv2.
III.C.4) a)Eneffectuantun bilan d’énergie,établirunerelation,notée (R3),entrev1,v2,h1eth2.
b) L’airse comportantcommeun gaz parfait,exprimerladifférence desenthalpiesmassiquesh2−h1en
fonction delamassemolaireMair,R,deladifférence destempératuresT2−T1etdeγ=γ1=γ2.Exprimer
enfin h2−h1enfonction deP1,P2,ρ1,ρ2etγ(relation (R4)).
c) Àpartirdesrelations(R3)et(R4),établirunenouvellerelation,notée (R5),entrelesvariablesP1,P2,
ρ1,ρ2,v1,v2etγ.
III.D–Caractérisationthermodynamiquedugazchoqué
CommeM2
1≫1, lesloisde conservation (R1),(R2)et(R5)permettentd’obtenirlesrelations simplifiées
suivantes(résultatsadmis):
v2
v1
=γ−1
γ+1;ρ2
ρ1
=γ+1
γ−1etP2=2ρ1v2
1
γ+1
Nousallonsàprésentexploitercesrelationspourdéterminerlescaractéristiquesthermodynamiquesdu gaz
choquédanslarégion (2).
III.D.1) ExprimerlenombredeMachM2danslarégion du gaz choqué enfonction deγ.Fairel’application
numérique etcommentervotrerésultat.
III.D.2) ExprimerlatempératureT2du gaz choqué enfonction deMair,R,γetv1.Fairel’application
numérique.
III.D.3) Àunetelletempérature, lesmoléculesdu gaz choquésontenfaitdissociéesenatomesionisésqui
formentun plasma. Le modèleprécédentestdoncincompletetun traitementrigoureuxsortdu cadrede ce
problème.Peut-on réellementposerγ1=γ2=7/5?La températureréelledu gaz choquédoit-elle êtreinférieure
ou supérieureàcelle calculée àlaquestion précédente?
Téléchargé gratuitement sur www.Doc-Solus.fr .
 6
7
8
6
7
8
1
/
8
100%