facicule TD - Amocops

E
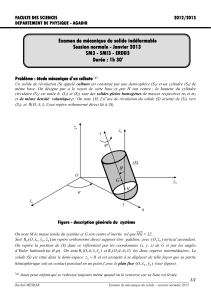
R= (O;⃗x, ⃗y, ⃗z)A= (1,0,0) B= (0,1,0) C= (0,0,1) −→
M(P, T)
PT−→
M(O, T)=2⃗y +⃗z −→
M(A, T) = ⃗y + 2⃗z
−→
M(B, T) = ⃗x + 2⃗y
−→
M(C, T)
⃗
RT
a b c
A B C D E−→
AB =−−→
DC =a
⃗
i−−→
AD =−−→
BC =a⃗
kR=
(O;⃗
i,⃗
j, ⃗
k)ETA
−→
M(A, T) = b
⃗
i
α β γ α
⃗
i+c⃗
j β⃗
i+γ⃗
k
B D T
A B D
R0= (O0;⃗x0, ⃗y0, ⃗z0)R= (O;⃗x, ⃗y, ⃗z)
R0R R0
O0⃗x0θ=ωt = ( d
⃗y0, ⃗y)−−→
O0O=at⃗y0ω a
t
R R0
⃗r R
⃗r = (0, a cos ωt, −asin ωt)⃗r
R0R

BR(0, b, 0) b
B
R R0
R0= (O0;⃗x0, ⃗y0, ⃗z0)R= (O;⃗x, ⃗y, ⃗z)
R0OA OB OC CL−→
OA =L⃗x −−→
OB =L⃗y
−→
OC =L⃗z R0
⃗
V(A/R0)−−→
OB −→
OC 2ωL −ωL
⃗
V(B/R0)−→
OC −→
OA ωL
⃗
V(C/R0)−→
OA −−→
OB ωL ωL
ω=ω(t)
A B C
⃗
Ω(C/R0)
A B C
P−→
OP =a⃗x +b⃗y +c⃗z)
P
P
R0R0= (O;⃗x0, ⃗y0, ⃗z0)
R1= (O1;⃗x1, ⃗y1, ⃗z1)R0O1
Ox0y0a−→
OO1θ(t)
Ox0O1y1Oy0ϕ(t) = (
[
⃗z0, ⃗z1)
O1y1
⃗
Ω(R1/R0)
R1M O1z1
−−−→
O1M=z(t)⃗z1
MR1
MR0
R1
MR0
R1
(P0) (B)O r
(P0)R0= (O0;⃗x0, ⃗y0, ⃗z0)

(P0)O0(P0)O0⃗z0
R= (O;⃗x, ⃗y, ⃗z) (B)
R0x y
O O0⃗x0O0⃗y0ψ, θ, ϕ
⃗
Ω(B/R0)
R0
R0
(P0)
θ
O
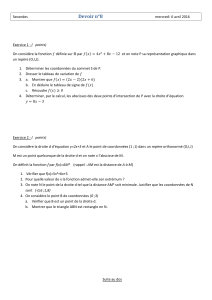
S2L R
G S P
R0= (O;⃗x0, ⃗y0, ⃗z0)O P ⃗z0P S
S P I
ARS= (G;⃗x, ⃗y, ⃗z)
S−→
AG =L⃗z S R0
ψ, θ, ϕ x y z G R0
P ⃗u
0< θ < π
2
u
y0
A
0
x
z0
O
z
(P) I
(S)
G
z
R L
(⃗u, ⃗v1, ⃗z0⃗
V(A/R0)⃗
V(I∈S/R0)

R= (O;⃗x, ⃗y, ⃗z)
Ox S1M
A O⃗y
S1O⃗y
S1⃗
F=−kOA⃗y A
S2AB m
2a G S1A
A⃗z R′= (A;⃗x′, ⃗y′, ⃗z)
Oxy y =OA
θ= (
\
O⃗x, −→
AB)z
RGR
G S2
RA S2
R
S=S1∪S2
S2
S
R
A S2
R
S
SR
S
(T)
(P)
G m 2a2b(a < b)
(T)G(T)
(∆) I I (T)
(∆) IG =l

R0= (O;⃗x0, ⃗y0, ⃗z0) (O⃗z0)
(∆) R= (G;⃗x, ⃗y, ⃗z) (P)
(G⃗x)IG I G (G⃗z)
ψ= ( d
⃗x0, ⃗x)⃗z0
θ= ( d
⃗z0, ⃗z)⃗x
2b
(P)
G
2a
x
(∆) (T)
z0
I
(∆)
T
I(∆) ⃗x
G(P)
(T)
I(T)
R0
G(P)
R0
I
(⃗x, ⃗y, ⃗z)G
I A
(I⃗x)B(I⃗y)
C(I⃗z)
IR0
ψ(t)
θ(t)
dψ
dt θ
θ
dθ
dt
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%