télécharger le PDF

Mines Physique 2 MP 2010 — Énoncé 1/6
´
ECOLE DES PONTS PARISTECH
SUPAERO(ISAE),ENSTAPARISTECH,
TELECOMPARISTECH,MINES PARISTECH,
MINESDESAINT–´
ETIENNE,MINESDENANCY,
T´
EL ´
ECOMBRETAGNE,ENSAEPARISTECH (FILI`
ERE MP)
´
ECOLE POLYTECHNIQUE(FILI`
ERE TSI)
CONCOURS D’ADMISSION 2010
SECONDE´
EPREUVEDEPHYSIQUE
Fili`
ere MP
(Dur´
ee del’´
epreuve:3heures)
L’usagedelacalculatrice estautoris´
e
Sujetmis `
adisposition desconcours:Cycle international, ENSTIM,TELECOMINT,TPE–EIVP
Lescandidats sontpri´
esdementionnerdefac¸on apparentesurla premi`
erepagedelacopie:
PHYSIQUEII —MP.
L’´
enonc´
ede cette´
epreuve comporte6 pages.
–Si, aucoursdel’´
epreuve,un candidatrep`
ere ce quiluisemble ˆ
etreune erreurd’´
enonc´
e,il estinvit´
e`
ale
signalersursa copie et`
apoursuivresa compositionenexpliquantlesraisonsdesinitiativesqu’il aura´
et´
e
amen´
e`
aprendre.
–Ilnefaudrapash´
esiter`
aformulerlescommentaires(incluantdesconsid´
erationsnum´
eriques)quivous
semblerontpertinents,mˆ
eme lorsquel’´
enonc´
enele demandepasexplicitement. Labar`
eme tiendra compte
de cesinitiativesainsiquedesqualit´
esder´
edaction dela copie.
574,8 KILOM`
ETRESPAR HEURE!
Lemardi3avril 2007,`
a13 h 14,laSNCF,associ´
ee `
aR´
eseauFerr´
edeFrance ainsiqu’`
ala com-
pagnieALSTOMportait lerecord du mondedevitessesur rail `
alavaleurde574,8 km.h−1au point
kilom´
etrique194 delaligne`
agrandevitesse est-europ´
eenne,grˆ
ace `
alarameTGV DuplexV150 com-
pos´
ee dedeux motricesPOSencadrant troisremorques.Laremorque centrale´
etait ´
equip´
ee `
a chaque
extr´
emit´
ededeux essieux moteursAGV.Pour r´
ealisercetexploit denombreux param`
etresphysiques
et techniquesont´
et´
e´
etudi´
esetoptimis´
es;dansleprobl`
emequisuit nousallonsenexaminerquelques
uns.
Lescaract´
eristiquestechniquesdu TGV,dont toutesnesontpasutilis´
eesdansleprobl`
eme,sont les
suivantes:massedelarame avec sespassagersMT=270 tonnes; longueurdelarame,LT=106 m;
largeurdelarame,ℓT=2,9m;hauteurdelarame,hT=4,1m.
Danstout leprobl`
eme,lamassevolumiquedel’airsera constante et´
egale`
a
ρ
a=1,3 kg.m−3,et
parsoucidesimplicit´
e,danslesapplicationsnum´
eriques,on prendrag=10 m.s−2pourlavaleurde
l’acc´
el´
eration delapesanteurterrestre eton n’utiliseraque3chiffres significatifs.
Téléchargé gratuitement sur www.Doc-Solus.fr .

Mines Physique 2 MP 2010 — Énoncé 2/6
I.—Trajetenlignedroite
Lorsd’un essair´
ealis´
edurant la campagnepr´
ealable`
alatentativederecordsurunevoie approxima-
tivementrectiligne etplusou moinshorizontale,on arelev´
elesdonn´
ees suivantes
t[s]0 70 95 124 155 231 263 332
Vkm.h−10 150 200 250 300 350 400 450
1—Calculersurchaqueintervalledemesurelesvaleursdel’acc´
el´
eration moyennedelarame,on
exprimera cesvaleursenm.s−2dansun tableaur´
ecapitulatif.Estimerladistance parcouruen´
ecessaire
pouratteindrelavitessede450 km.h−1.
2—Unjournaliste convi´
e`
a cetessaiavait apport´
eun petit pendulesimplequ’il avait suspendu au
plafond delavoiture.Ilcomptait,selon sesmots,«
mettre en´
evidence lagrandevitessedu train
».
Quelle a ´
et´
e,enr´
egimepermanent,l’inclinaison maximaledu pendulepar rapport`
alaverticaledurant
l’essai?
Laramereposesurlesrailsparl’interm´
ediairedeseize essieux,dontdouze moteurs,compos´
escha-
cun dedeux roues.Laforce moyenne appliqu´
ee parlesrails surchaquejantedesrouesmotricesest
appel´
ee force detraction `
alajante.
3—Onsupposequelesefforts sont´
egalementr´
epartis surchaqueroue.Calculerlaforce de
traction `
alajante au d´
emarrage.LaloiempiriquedeCurtiusetKniffer (1943)exprimelavariation du
coefficientdefrottementstatique
µ
aucontactroue−rail (rail sec etpropre)enfonction du moduleV
delavitessedu trainexprim´
ee en km.h−1.Elle affirmeque
µ
=0,161 +7,5/(44 +V).Montrerqu’il
n’yavait pasdepatinagepossibledesrouesau d´
emarragedelarame.
Lorsdu mouvement,un certain nombrede causesdefrottementsproduisentuneforce r´
esultante
d’intensit´
eR=A+BV +CV2quis’oppose`
alavitesseVdu train.Cetteintensit´
eRestappel´
ee
r´
esistance `
al’avancement.PourunerameTGV Duplexstandard de2motriceset8remorques,laSNCF
adopte,grˆ
ace `
adesmesureseffectu´
eesjusqu’`
adesvitessesde360 km.h−1,lesvaleursA=2 700 N,
B=31,8N.km−1.hetC=0,535 N.km−2.h2.Onfait l’hypoth`
esequel’on peutconservercesvaleurs
pourdesvitesses sup´
erieures.
4—Lapuissance totaledesmoteursembarqu´
eslorsdu record´
etait de19,6MW.Cettepuissance
est-ellesuffisantepourpermettre`
aunerameTGV Duplexstandard d’atteindrelavitessedu record
pr´
ec´
edentqui´
etait de540 km.h−1?Pourlerecord vis´
e,larameTGV avait ´
et´
emodifi´
ee par rapport
`
auneramestandardetnotamment lesdiam`
etresdesrouesavaient´
et´
e agrandis,passantde920 mm `
a
1 092 mm.Quelle est laraison de cetagrandissementdesroues?
5—PourlarameV150 du record quine comportait que3remorquesetpourlaquellequelques
modificationsd’a´
erodynamisme avaient´
et´
e apport´
ees,lesparam`
etresdelar´
esistance `
al’avancement
sontA=1700 N,B=20,1N.km−1.hetC=0,37 N.km−2.h2.Calculerlaforce detraction `
alajante
lorsdel’essaidu tableau delaquestion 1 `
alavitessede450 km.h−1.Existe-t-il un risquedepatinage ?
6—Montrerquelerecord n’estpossiblequedansune zonededescente.Estimez lapentede
celle-ci.
Lorsd’un essaidanslaphasedepr´
eparation un incidentad´
eclench´
elefreinaged’urgence alorsque
larameroulait `
alavitesseVo=506 km.h−1et larames’est immobilis´
ee au boutde15 km.
7—Quelle´
etait l’´
energie cin´
etiquedelarame aumomentdu d´
eclenchementdu freinage.Calculer
lad´
ec´
el´
eration moyennedurant lefreinage et ladur´
ee de ce freinage.
Téléchargé gratuitement sur www.Doc-Solus.fr .

Mines Physique 2 MP 2010 — Énoncé 3/6
8—Leprotocoledefreinagehabituelcomporteplusieursphases.Danslapremi`
ereon ouvre
ledisjoncteur,lesmoteurs sontalorsencircuit ouvert,c’est la«marchesurl’erre».Calculerla
d´
ec´
el´
eration aux alentoursde500 km.h−1pourlarameV150.On notex(t)ladistance parcourue
depuisl’ouverturedu disjoncteur`
al’instantt=0.En ne consid´
erantqueleterme enV2dansla
r´
esistance `
al’avancementetun parcoursenterrain horizontal,exprimerx(t)enfonction det,dela
vitesseinitialeVodelarame etdeladur´
ee
τ
=MT/(CVo)donton pr´
eciseralavaleurnum´
erique en
secondes.Onmarchesurl’errepourabaisserlavitesse`
a400 km.h−1.Quelle est ladistance parcourue
pendantcettemarche ?
9—Dansunesecondephase,lefonctionnementde certainsmoteursest invers´
e,chacun desquatre
moteursPOSdevientunedynamoconnect´
ee `
auner´
esistance RM=0,97 Ωrefroidieparun d´
ebit d’air
important.Ce d´
ebit estadapt´
e`
alapuissance de900 kWd´
egag´
ee pareffetJouledanslar´
esistance.
Quelle est lad´
ec´
el´
eration danscettedeuxi`
emephase,autourde400 km.h−1?
Lafin du freinage´
etait assur´
ee parde classiquesdisquesdefreinsurlesessieux non moteursquiont
´
et´
eport´
es`
aplusde800◦Csansd´
eformation niusure anormale!
FIN DELA PARTIEI
II.—Comportementenvirage
Surletronc¸on delavoied’essai,il yavait quelquesvirages.Danslasuitenousprendronscomme
exempleleviragesitu´
e entrelespointskilom´
etriques190 et197 delavoie,delongueurd’arc
s=6 323 metderayon de courbure
χ
=16 667 mtournant`
agauche.Ce virage estparcouru`
a
lavitesse constantede540 km.h−1.Lesfacesinternesdesrails sontdistantesdeℓr=1 435 mm.Les
centresdegravit´
edesremorques sontapproximativementsitu´
es`
aunehauteurh=2,5mdu rail.
Onconsid`
eredansun premiertempsle cashypoth´
etiqued’unevoiesansd´
evers,c’est-`
a-direqueles
deux rails sontdanslemˆ
emeplan horizontal.
10 —Latransition entrelavoierectiligne et lavoie en viragesefait parl’interm´
ediaired’un
tronc¸on deraccordementparaboliquedelongueur130 m.Quelle est ladur´
ee de cettephasedetran-
sition ?Qu’ontressenti lespassagers setenantdeboutdanslesvoituresdurant lefranchissementdu
tronc¸on detransition ?Ontraduira ceseffetsdefac¸on quantitative enexprimant lesvaleursextrˆ
emes
delaforce ressentieparun passagerdemassemp=75 kgsetenantaucentredu train.
11 —On d´
efinit lasecousse(traduction du terme anglo-saxon «jerk»)commelad´
eriv´
ee du
vecteuracc´
el´
eration par rapportautemps.Lesnormeshabituellesdestransportsencommun limitent
l’intensit´
edes secoussesacceptables`
alavaleurde2m.s−3pourle confortdespassagers.Lasecousse
engendr´
ee parce viragerespecte-t-ellelanormede confort?
12 —Un verred’eau pos´
esurlatablettedevantun passagermettrait en´
evidence laforce d’inertie
pr´
esentedansleviragededeux mani`
eresdiff´
erentes.Lesquelles?
13 —`
Aquellevitessemaximaleth´
eoriqueletrain peut-il parcourirleviragesansrisquede
d´
ecollementdesroues?
Enfait levirage estrelev´
eprogressivementdurant letronc¸on paraboliquederaccordement.Ensortie
de ce dernier,lerail ext´
erieurestsur´
elev´
ed’unehauteur
δ
=130 mm par rapportaurail int´
erieur.Ce
d´
ecalagepersistedurant toutelaphase`
a courbure constante,enfin,un tronc¸on paraboliquedesortie
deviragepermetderedescendrelerail ext´
erieur`
ason niveauinitiald`
esleviragetermin´
e.
14 —Quelles sont lesam´
eliorationsapport´
eesparled´
everspar rapport`
alasituation delaquestion
pr´
ec´
edente ? D´
eterminer,dansler´
ef´
erentieldelarame,lanormeaedel’acc´
el´
eration centrifugesubie
parlepassager.Quelle est l’indication du penduledu journalistedont il estquestion danslapremi`
ere
partiedurant lepassagedu virage ?
FIN DELA PARTIEII
Téléchargé gratuitement sur www.Doc-Solus.fr .

Mines Physique 2 MP 2010 — Énoncé 4/6
III.—Alimentation´
electrique
Lapuissance ´
electrique estfournie auTGV `
apartirdesous stations´
electriquesSSi=1,...,nquel’on
assimilera`
adesg´
en´
erateursid´
eaux detension nominaleE=25 kVetdefr´
equence
ν
=50 Hz.Ces
sous stations sont implant´
eeslelong delavoie etespac´
eesd’unedistance d=60 km.Elles sontreli´
ees
parun filconducteur,la cat´
enaire,suspendu au dessusdesrails.Lamotrice TGV rec¸oit l’alimentation
dela cat´
enaireparun contactglissantappel´
epantographesitu´
esurson toit.Touslesmoteursdela
motrice sontmont´
esen parall`
ele entrelepantographe et lesrailsquiserventdeliaison masse`
ala
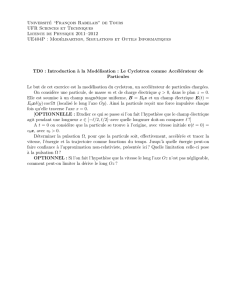
Terre.On peutsch´
ematiserle circuit d’alimentation surlafigure1.
Lorsdu record,lapuissance desmoteurs
´
etait augment´
ee par rapportaux moteurs
des´
erie et latension d’alimentation en
sortiedes sous stationsavait ´
et´
emont´
ee
exceptionnellement`
a31,2 kVsurlesec-
teurdu record`
alaplace des25 kVno-
minaux.Aumomentdu recordlapuis-
sance ´
electrique consomm´
ee «au panto-
graphe»´
etait de24 MW et l’intensit´
e a
´
et´
emesur´
ee `
a800 A.FIG.1 – Sch´
emad’alimentation du TGV
Pournotre´
etudenousnousplac¸onsdanslesconditions suivantes: lefildela cat´
enairedesection
s=1,47 cm2estencuivreder´
esistivit´
e
ρ
=1,72 ×10−8Ω.m.Latension des sous-stations´
etant
nominale,on supposequel’intensit´
edu courantcirculantdanslesmoteursestde600 A.Lerail
rectiligne estconfondu avec l’axeOxdont l’origine estplac´
ee `
aladerni`
eresous-station ´
electrique
atteinteparleTGV.Lavariablexestdoncd´
efiniemodulod.
15 —Calculerlar´
esistance Rtotaledela cat´
enaire entredeux sous stations,puislar´
esistance
lin´
eique
λ
enΩ.km−1.Peut-on n´
egligerlesdiff´
erencesdephasesentrelesdiverspointsdelaligne
entredeux sous stations,quelnomdonne-t-on `
a cette approximation ?
16 —D´
eterminerl’amplitudedesintensit´
esI1(x)etI2(x)d´
elivr´
eesparles sous stationsencadrant
leTGV situ´
e enxainsiquel’amplitudeU(x)delatension effectivementdisponible aux bornesdela
motrice situ´
ee enx.Exprimeralorslapuissance Pdissip´
ee pareffetJouledansla cat´
enaire.
17 —Localiserlaposition xmdelamotrice quicorrespond `
aun minimumdelatension d’alimenta-
tion desmoteurs.Exprimeralorscettetension minimale enfonction deE,RetI=I1+I2.D´
eterminer
lavaleurmaximalePmdelapuissance dissip´
ee enfonction deRetI.Commentercesr´
esultatsainsi
quelesdiversesapplicationsnum´
eriquesaff´
erentes.
Ledispositif r´
eeld’alimentation dispose
enfait d’un second fil(appel´
e«feeder»)
identique`
ala cat´
enaired´
eploy´
e entreles
deux sous stationsvoisines;aumilieu
du parcoursun contactest´
etabli avec
lefildela cat´
enaire,aboutissant`
ala
sch´
ematisation delafigure2.Onmontre
quelatension Uf(x)aux bornesdelamo-
trice s’´
ecrit maintenantFIG.2 – Alimentation avec feeder
Uf(x)=E−
λ
x(2d−3x)
2dIpour0≤x≤d
2
Téléchargé gratuitement sur www.Doc-Solus.fr .

Mines Physique 2 MP 2010 — Énoncé 5/6
18 —Calculerlatension Ufaux bornesdelamotrice enx=d/2,ainsiquesavaleurminimale.
Repr´
esentersurun mˆ
emegraphiquelesfonctionsUetUfpourx∈[0,d].Commenterlerˆ
oledu feeder.
FIN DELA PARTIEIII
IV.—Instrumentationlorsdesessais
Pourveiller`
alas´
ecurit´
e et tirerdesenseignements surle comportementdu mat´
erieldanscescondi-
tionsextrˆ
emesdevitesse,denombreux capteurs(plusde350,enregistrantplusde500 param`
etres!)
´
etaientdispos´
esen diversendroitsdelaramed’essai.Lesinformationsde cescapteurs,dirig´
eesvers
lavoitureR8 transform´
ee enlaboratoirescientifique,´
etaientanalys´
esparune´
equipe compos´
ee d’une
quarantainedetechnicienset ing´
enieurs.
Pourd´
etecterparexempled’´
eventuellesvibrationsou instabilit´
es significativesd’une entr´
ee enr´
eso-
nance,il estn´
ecessaired’´
etudierlemouvementdediversespartiesmobilesaucoursdel’essai.On
prendra comme exemplelemouvementdel’unedesrouesdelarame,l’´
etude consistera`
areleveren
continu l’acc´
el´
eration d’un point`
alap´
eriph´
eriedu disque constituantcetteroue.
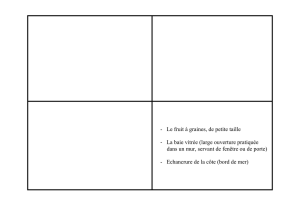
On pr´
esenteiciun mod`
eled’acc´
el´
erom`
etre ca-
pacitif1DdelafamilledesMEMS(MicroElec-
troMechanicalSystems)fix´
esurunepuce de
3mm de cˆ
ot´
es.Ladimension typiquedu cap-
teurluimˆ
eme estde400
µ
m.Lerestedela
puce estoccup´
eparl’´
electronique associ´
ee.Le
mod`
elem´
ecaniquesimplifi´
edel’acc´
el´
erom`
etre
estrepr´
esent´
esurlafigure3.Unemassem=
3
µ
g,ditemassesismique,assimilable`
aun
pointmat´
erielAestreli´
ee `
al’enveloppedu
capteurpardesmicro poutres´
elastiquesde
coefficientderaideurk=0,17 N.m−1.Elles
contraignent lemouvementdeAdansunedi-
rection fixeOzpar rapportau boˆ
ıtier.FIG.3 – Sch´
emadel’acc´
el´
erom`
etre
Unamortissement`
afrottementvisqueux proportionnel`
alavitessedeApar rapportau boˆ
ıtieretde
coefficientf=6,8
µ
N.m−1.sestassur´
eparun gaz comprim´
edansleboˆ
ıtier´
etanche.On notezA
laposition deAetzBlaposition d’un pointder´
ef´
erence du boˆ
ıtierdu capteur rigidementfix´
e au
syst`
emedonton veutmesurerl’acc´
el´
eration.On prendrazA=zBaureposeton noteraz=zA−zB.
Deux condensateursplansC1etC2sontform´
espardeux armaturesfixes
σ
1et
σ
2li´
eesau boˆ
ıtieret
parl’armaturemobile
σ
0li´
ee `
aA.Ladistance entrelesdeux armaturesfixes seranot´
ee 2e(on prendra
e=50
µ
mpourlesapplicationsnum´
eriques)et lasurface de chacunedesarmaturesestS.Aurepos
l’armature
σ
0est`
a´
egaledistance de
σ
1et
σ
2.Onrappellequelesrouesdu TGV record ontun rayon
rt=546 mm.Lapuce estquant`
a elleimplant´
ee surlaface int´
erieured’uneroue(suppos´
ee plane
verticale)del’unedesremorques.Elle estfix´
ee `
aunedistance rb=540 mm del’axederotation de
laroue,deplusl’axeOzdu boˆ
ıtierdu capteurestconfondu avec un rayon delaroue.
IV.A.—Analysem´
ecanique
19 —´
Etablirl’´
equation diff´
erentiellev´
erifi´
ee parz.On noteraaBla composantedel’acc´
el´
eration
du boˆ
ıtiersurOz,on utiliseralesparam`
etres
ω
o=qk
m,
ξ
=f
2m
ω
odonton pr´
eciseralesvaleurs
num´
eriqueset l’on tiendra comptedu poidsdeA.
20 —Onconsid`
ereun roulementsansglissementdelarouesurun rail horizontal`
alavitesse
constantedeV=540 km.h−1.D´
eterminerla composantesurOzdel’acc´
el´
eration communiqu´
ee au
boitier.On noteraaB0cette composante.
Téléchargé gratuitement sur www.Doc-Solus.fr .
 6
6
1
/
6
100%