a.1 caracteristiques mecaniques du systeme de broche . 8

Durée : 4 h
Physique Appliquée
Coefficient : 3
BTS 2010
Fabrication du châssis Manitou
Nouméa
Calculatrice autorisée
Meca Stat– MAS – Meca FLu – Meca transitoire – Qualité énergie –
PD3
Solution
A. AMELIORATION DE LA PRODUCTIVITE
A.1 CARACTERISTIQUES MECANIQUES DU SYSTEME DE BROCHE . 8 .
A.1.1
140
1,58 5800 505,6
725
b
FN
.
140
2,25 5800 720
725
b
FN
A.1.2
3
1 1 1 505,6 32,6 10 16,48
b b e
C F R Nm
3
2 2 2 720 34,9 10 25,13
b b e
C F R Nm
A.1.3
12
16,48 25,13 41,6
btotal b b
C C C Nm
.
A.1.4 Il ne faut pas confondre la puissance utile du moteur et la puissance mécanique nécessaire au niveau de la
broche :
2
41,6 725 3158
60
b btotal
P C W
A.1.5
m
N rN
or
12
tour
vv
NdR
v
2
v
r
R2
3
3
80 10 0,8
100 10
m
m
R
rR
R
Donc
0,8r
A.1.6
725 906 / min
0,8
mN
N tr
r
.
A.1.7
3158 3715
0,85
b
uP
PW
.
A.1.8
3715 39
2
906 60
u
rm
P
C Nm
donc
39
r
C Nm
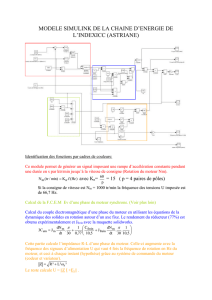
A.1.9. On peut admettre la courbe du MAS passe par 1000 tr/min (vitesse de synchronisme plausible) et par le
point PF2 .
Le couple mesuré alors est de 100 Nm
Donc
2
100 906 60
u r m
PC
Le moteur est donc sous dimensionné.
0.5
0.5
0.5+0.5
0.5
0.5+0.5
1
0.5
0.5+0.5
1
1

PF 1 (906 ; 39)
150 mm/min
PF 2’ (906 ; 90)
PF 2 (860 ; 100)
A.2 CARACTERISTIQUE MECANIQUE DE LA MACHINE ASYNCHRONE . 7 .
A.2.1
rVV
Ig
RR
g
. Donc
rV
Ig
R
A.2.2
2
2
3 3 3
em r
R R V R
P I g
g g R
g2
g2
2
V
R
2
3V
gR
donc
2
3
em V
Pg
R
A.2.3
Sm
S
NN
gN
.
A.2.4:
21
3
em
em sS
PV
Cg
R
donc
21
32 60
60
em V
Cgf
Rp
donc
2 2 2
2
60
33
2 60 2
Sm
em S m
S
fp
NN
V p V p
C N N
R f N R f
Donc
em S m
C K N N
avec
2
2
3
120 pV
KRf
A.2.5
2
22
2
3 3 3 4,6 2,81
120 120 0,54
pV
KRf
. Donc K = 2,81 Nmtr-1min
A.2.6
/min
/
46
60 920 / min
60 3
tr
s
Ss
tr s
N
ff
n N tr
pp
.
1
1
0.5
1
0.5
1

PF 1 (906 ; 39)
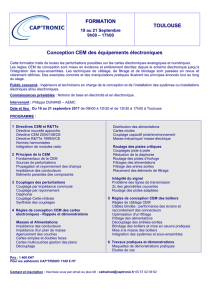
A.2.7 Cem = 0 pour NS = 920 tr/min
Si Cem= 40 Nm comme
2,81 920 40
em m
CN
Donc
40 920 905 / min
2,81
m
N tr
1 (0.5 par point)
A.2.8. Le point de fonctionnement est Cem0 = 39 Nm et Nm0= 906 tr/min 1
A.3 AMELIORATION DE LA VITESSE D'AVANCE . 6 .
A.3.1
3
14
1
6,2 10 2 m/min
31 10
aQ
VS
. 0.5+0.5
6,2 l/min = 6,2 dm3/min = 6,2.10-3 m3/min
A.3.2. Sur le trajet entre 2 et O la pompe n’est pas présente donc Ph=0
2 0 2 0 02
0
h
P
p p g z z p
Q
5
2 0 2 0 02
2 0 0 2 20
5 5 5
2
0,17 10
1 10 850 9,81 2 15 10 15,83 10
p p g z z p
p p g z z p
p
Donc p2 = 15,83.105 Pa 0.5+0.5
A.3.3 Comme il n’y a pas d’accélération du vérin
0F ma
donc la force exercée d’un côté de la paroi est égale
à la force exercée de l’autre côté de la paroi :
1 2 1 2
0F F F F
la force de part et d’autre est identique donc
1 1 2 2
p S p S
Donc
4
55
2
12 4
1
25 10
15,8 10 12,74 10
31 10
S
p p Pa
S
1+0.5
A.3.4
1 0 1 0 01
h
P
p p g z z p
Q
01 1 0 1 0h
P Q p p p g z z
0.5

35 5 5
6,2 10 12 10 12,8 10 1 10 850 9,81 2 0
60
h
P
247
h
PW
0.5
A.3.5.
247
2 2 823
0,6
h
uP
PW
>1,1 kW légèrement surdimensionné 1+0.5
B. MISE EN SECURITE DE LA MACHINE . 9 .
B.1.
0
mu
d
J C C
dt
1
B.2
2
2
0 906 60 9,48
10 0
m
drad s
dt
. 1
B.3 Cu =0 donc
00,5 0,0527 ²
9,48
m
C
J kg m
ddt
1
B.4
2
0 1560 60 544
0,3 0
m
ddt
0.5
B.5.
00,0527 544 0,5 28,2
m
ud
C J C Nm
dt
1
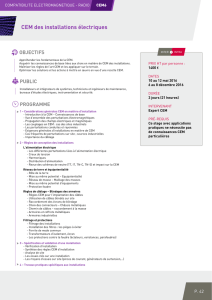
B.6.Voir courbe 1
B.7.
uu
PC
0.5 + 1.5 tracé
Au départ
3
2
28,2 1560 4,6 10
60
u
PW
Donc Pumax = - 4600W
B.8. Fonctionnement en génératrice 0.5
B.9 . Pas de pertes donc Pm=Pumax=4,6 kW 0.5
B.10 .
22
600 6
60
RU
P kW
R
. 1
B.11 La puissance dissipée par la résistance est supérieure à
la puissance fournie par le MAS en génératrice donc la
résistance est correctement dimensionnée. 0.5
PF 1 (906 ; 39)

C. ALIMENTATION ELECTRIQUE DE LA MACHINE . 10 .
C.1 ETUDE DE LA PROTECTION CONTRE LES SURINTENSITES
C.1.1 .
( ) 2
RV
i t i t
. 0.5
C.1.2 .
2 2 2 2 2 2 2
10,6 9,5 8,9 7 6,2 4,2 3 19,9
V
I
donc IV = 19,9 A 0.5
C.1.3 .
22
19,9 10,6 1,59
10,6
donc =159% 0.5
Pour un signal purement sinusoïdal IV= I1 donc =0% 0.5
Les harmoniques de courant proviennent des redresseurs 0.5
C.1.4.
22
2 2 2
2 10,6 2 9,5 ... 2 10,6 9,5 ... 2 40
RV
I I A
0.5
Les fusibles sont donc sous dimensionnés 0.5
C.2 INFLUENCE DE LA STRUCTURE DU VARIATEUR SUR LES COURANTS DE LIGNE
C.2.1 . 1 (Diodes)
C.2.2 . 0.5 (US)
C.2.3 .
400
36
36 3540
SV
UV
0.5
C.2.4. IV =IS si D1 conduit
IV =-IS si D’1 conduit 1(courbes)
C.2.5.
540 12,6 6,8
S S S S S
P U I I U kW
1.5
6,8
V
P kW
0.5
C.2.6 Voir doc =0 . 0.5+0.5(courbe fondal)
C.2.7 .
1
3 cos
V
P UI
.
16800 9,8
3 cos 3 400 1
V
P
IA
U
1
1
/
5
100%