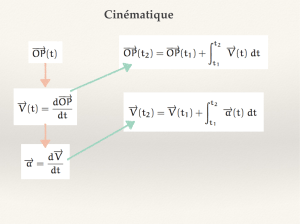
TD du CH01 : Les moteurs électriques et les charges mécaniques

BTS électrotechnique 2ème année - Sciences physiques appliquées
TD du CH01 : Les moteurs électriques et les charges mécaniques
Exercice n°1 : rappel de mécanique de 1ère année
On souhaite dimensionner la motorisation d’un portique de chargement de containers sur bateau.
Le portique se compose d’un bâti qui se déplace sur des rails sur le quai du port.
Le bâti supporte un chariot de pont roulant de M=32 tonnes se déplaçant perpendiculairement au quai.
Le chariot peut lever ou descendre des charges de masse m=50 tonnes.
Du point de vue mécanique on est en présence de trois mouvements de translations indépendants, selon
les trois axes. Cependant, dans la problématique, on s’intéresse uniquement au déplacement du chariot
(suivant l’axe des x).
On donne le profil cinématique (profil de vitesse) du mouvement du chariot :
La masse déplacée est M+m=82 tonnes.
Partie A : Détermination des forces et de la puissance mises en jeu
A.1 Calculer l’accélération a dans les 7 phases du mouvement avec son signe.
A.2 On néglige toute force s’opposant à l’avancement (frottements). Faire le bilan des forces s’exerçant
sur le chariot à l’aide d’un schéma.
A.3 En déduire que F=(M+m)a.
A.4 En déduire la force F nécessaire au mouvement pour chaque phase avec son signe, puis tracer le
profil de la force F (c’est à dire la force en fonction du temps) sur le document.
A.5 Quelle est la relation permettant de calculer la puissance à partir de la force dans le cas de la
translation.

A.6 Utiliser cette relation pour tracer le profil de la puissance p (c’est à dire la puissance en fonction du
temps) sur le document réponse.
Partie B : Dimensionnement du moteur
Le mouvement est assuré par un moteur entraînant les roues du chariot par un réducteur. Le moteur
tourne à 1450tr/min lorsque le chariot se déplace à 3m/s. Le couple de la machine est constant pendant
la phase d’accélération et de décélération.
Le rendement du réducteur est =80% dans les deux sens de transfert d’énergie :
Du moteur vers les roues : en phase de traction, charge entraînée
Des roues vers le moteur : en phase de freinage, charge entraînante.
B.1 Calculer la puissance utile maximale que le moteur doit fournir pendant les phases de traction.
B.2 Calculer la puissance mécanique maximale absorbée par le moteur pendant les phases de freinage.
B.3 Choisir la référence du moteur parmi la gamme DM1 (voir documentation technique en annexe )
Exercice n°2 : Stabilité d’un point de fonctionnement
La caractéristique Tm = f(Ω) d'un moteur asynchrone dans les conditions nominales de fonctionnement
(Un, fn) a l'allure ci-dessous. On connecte sur l’arbre de ce moteur une charge mécanique de couple
résistant Tr constant.
1. Les points de fonctionnement M1 et M2 sont-ils stables ? Justifier.
2. A la suite d’une microcoupure d’alimentation, le couple moteur s’annule ; le groupe ralenti alors quittant
le point M1 en suivant Tr=f(Ω). Lors de la réalimentation du réseau, on se situe au point M1’.
2.a Déterminer alors le signe de l’accélération
2.b Comment va évoluer le groupe ?
3 Même question avec le point M1‘’.
Eléments de réponse :
Ex2 : A.1. +0,75m.s-2; 0 m.s-2 ; -0,75m.s-2; 0 m.s-2; -0,75m.s-2; 0 m.s-2 ; +0,75m.s-2
A.4. Suivant la valeur de a ; F=61,5kN, 0kN ou -61,5kN
A.6. P varie entre -184,5kW et 184,5kW
B.1 231 kW B.2 148kW B.3 DM1 355 M 4
T(N.m)
Ω(rad.s-1)
Tm
Tr
M1’
M1
M2
M2’
M1‘’

Document réponse :
184,5 kW
-184,5 kW
61,5 kN
-61,5 kN
0
0
0

Annexe : Documentation technique de la gamme de moteurs DM1

1
/
5
100%