TP Cordeuse de Raquette : Schéma Bloc et Fonction de Transfert

Sciences Industrielles de l’Ingénieur CPGE - Saint Stanislas - Nantes
TP 2-1 Cordeuse.doc page 1/
7
TP 2-1 : Cordeuse de raquette : Schéma bloc et fonction de transfert
Présentation du TP et mise en situation
Mise en situation du Système
Un des éléments importants dans les sports de raquette tels que le tennis ou le badminton est la
tension du cordage. Pour connaitre « sa » tension, le joueur doit faire un compromis entre puissance et
précision. Pour donner des repères, un joueur comme Roger FEDERER utilise une tension comprise entre
21 et 23 kg, alors qu’un joueur comme Raphael NADAL utilise une tension de 25 kg et Novak
DJOKOVIC une tension de 27 à 28 kg (source : site interne http://toutsurlecordage.com).
Le système étudié est un système qui permet de corder des raquettes de tennis et de badminton avec
une tension bien déterminée. On en trouve notamment chez les professionnels assurant le cordage de ces
raquettes. Le principe du cordage des raquettes est donnée par la vidéo suivante que vous pouvez
visionner rapidement : http://www.youtube.com/watch?v=Eq4X1Da2pi4
Eléments fournis avec cet énoncé
le système de cordeuse de raquette didactisé et son boitier d’acquisition.
Un PC connecté au système avec accès internet
Un dossier ressource
Un mètre ruban
Objectif et durée de la séance de TP
Ce TP a une durée de 2h.
Le but de cette séance de travaux pratiques est de réaliser la modélisation de l’asservissement en
effort de tension de la corde et de déterminer sa fonction de transfert.
Vous répondrez aux questions sur ce document.

Sciences Industrielles de l’Ingénieur CPGE - Saint Stanislas - Nantes
TP 2-1 Cordeuse.doc page 2/
7
Présentation générale du système étudié
La machine à corder modèle SP55 est un système qui permet de réaliser le cordage d'une raquette de
tennis ou de badminton avec une tension prédéfinie. Ce système est constitué principalement de deux
sous-ensembles :
Le berceau et les pinces qui permettent respectivement de fixer la raquette et de maintenir la
tension de la corde (opérations manuelles).
Le mécanisme de mise en tension qui permet d’obtenir de façon précise la tension souhaitée dans
la corde (opération automatisée).
Dans ce qui suit, nous allons étudier uniquement le mécanisme de mise en tension
Mécanisme de mise en tension
Présentation
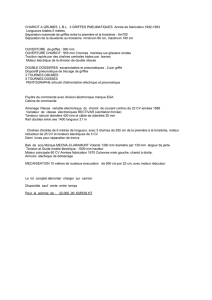
Le mécanisme de mise en tension présenté ci-dessous est constitué principalement d'un
motoréducteur et d'une transmission par chaîne assurant le déplacement du chariot. Celui-ci porte le mors
de tirage auquel est fixée la corde à tendre.
Le motoréducteur est composé d’un moteur électrique à courant continu piloté par une carte de
commande et d’un réducteur à roue et vis sans fin (rapport de transmission R
vsf
=50). A la sortie de ce
moto réducteur un pignon tire une chaîne liée au chariot sur lequel est fixé le mors de tirage.
Le guidage en translation du chariot est réalisé par deux douilles à billes sur une colonne. Le
pincement de la corde dans le mors de tirage est assuré par un système formant un coin.
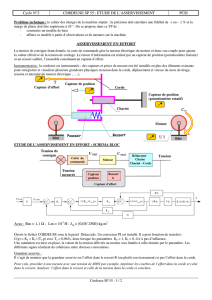
Fonctionnement
Le brin tendu de la
chaîne est attaché à un
poussoir (P) en appui sur le
chariot (C) par l'intermédiaire
d'un ressort calibré (R).
Lors de l'opération de
tension de la corde, le
poussoir (P) de déplace par
rapport au chariot en écrasant
le ressort (R) d’une valeur λ.
(U, I)
CMoto-réducteur
R
(T)
Bâti
Potentiomètre linéaire Potentiomètre rotatif
Capteur d’effort
P
λ
µθ
φ
(λ)
(φ)
Ce déplacement λ est mesuré par un potentiomètre linéaire qui envoie, à la carte de commande,
une tension u
R
, image de l’effort de tension de la chaîne. Celle ci gère alors la commande du moteur
nécessaire à la réalisation précise de la tension.
Mors de tirage
Chariot
Moto-Réducteur
Chaîne
Mécanisme de mise en tension
Pignon

Sciences Industrielles de l’Ingénieur CPGE - Saint Stanislas - Nantes
TP 2-1 Cordeuse.doc page 3/
7
Travail demandé
1- Structure de l’asservissement
On adopte les notations des fonctions temporelles du système suivantes :
Effort de tension de consigne f
C
(t) Tension image de la consigne u
C
(t)
Tension d’alimentation du moteur u
m
(t) Tension image de l’effort de la chaîne u
R
(t)
Effort de tension de la chaîne f
R
(t) Position linéaire du poussoir λ(t)
Couple moteur c
m
(t) Ecart à l’entrée du correcteur ε(t)
Couple sur le pignon de chaîne c
P
(t) Effort de tension de la corde f
t
(t)
Les noms des différents éléments du système sont :
Moteur Correcteur Réducteur
Adaptateur Pignon - chaîne Chariot
Potentiomètre linéaire Ressort
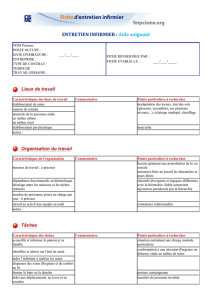
Placer sur le schéma bloc ci-dessous : les noms des différents blocs
Les fonctions temporelles
Les unités SI de ces fonctions temporelles
+-
Capteur d'effort
2- Fonction de transfert du capteur
Expérimentation
Mettre la cordeuse, l’ordinateur et la station de mesure sous tension.
Au clavier de la cordeuse, entrer une consigne de 20 daN = 20 kgf puis sélectionner v
1
qui
correspond à la vitesse la plus lente de déplacement du chariot.
Coincer le fil dans les mors sans appuyer sur le gros poussoir noir !!!
Sur l’ordinateur lancer le logiciel d’acquisition de mesures lié à la cordeuse. Choisir l’icône
« mesure » (pied à coulisse) et initialiser la mesure.
Appuyer sur le petit bouton noir de la station de mesure qui lance l’acquisition. Puis lorsque le
décompte de 10 s a commencé appuyer sur le gros poussoir noir de la cordeuse qui lance le déplacement
du chariot. La corde est tendue. Attendre la fin de l’acquisition. Puis appuyer à nouveau sur le gros
poussoir noir de la cordeuse pour stopper la tension de la corde .
Cliquer sur l’icône « courbes ». Afficher le résultats suivant, tracé en fonction de l’écrasement du
ressort : de l’effort f
R
de traction de la chaine : . Puis imprimer la courbe obtenue.
2.1- En mesurant la pente de la droite ainsi obtenue, déterminer en N.mm
−1
puis en N.m
−1
la raideur
k du ressort.

Sciences Industrielles de l’Ingénieur CPGE - Saint Stanislas - Nantes
TP 2-1 Cordeuse.doc page 4/
7
2.2- Le potentiomètre linéaire est du type MM15. Il est alimenté par la carte de commande avec une
tension continue de u
CC
= 5 V. A partir du dossier technique annexe 6, donner en mm la course électrique
C
E
de ce potentiomètre : Course pour laquelle la tension de sortie varie de 0 V à la tension maximale.
Ce potentiomètre est un gain pur K
PL
= u
R
λ . Calculer La valeur numérique en V.m
−1
de ce gain.
Course électrique : C
E
= Gain du potentiomètre : K
PL
=
2.3- Pour un effort de tension de la chaîne nul le poussoir est en butée à gauche. On suppose que
dans ce cas la longueur l du ressort est égal à sa longueur à vide l
0
.
Ce ressort est un gain pur K
R
= λ
f
R
. Calculer La valeur numérique en m.N
−1
de ce gain.
Le capteur d’effort est un gain pur K
c
= u
R
f
R
. Calculer La valeur numérique en V.N
−1
de ce gain.
Gain du ressort : K
R
= Gain du capteur d’effort : K
C
=
3- Gain du chariot
Théoriquement la fonction de transfert du chariot est un gain pur de K
Ch
= 1. Soit f
t
(t) = f
R
(t). Quel
phénomène physique fait qu’en réalité f
t
(t) < f
R
(t) soit K
Ch
< 1 ?
4- Gain de l’adaptateur : K
A
4.1- L’adaptateur est un gain pur K
A
. Calculer ε(t) en fonction de f
C
(t), f
t
(t), K
A
, K
C
et K
Ch
.
4.2- Lorsque la consigne f
C
(t) et la réponse f
t
(t) sont égales, l’écart ε(t) doit être nul. En déduire la
valeur en V.N
−1
du gain de l’adaptateur K
A
si K
Ch
= 1.
5- Gain du réducteur
5.1- Le rapport du réducteur à roue et vis sans fin est de K
rsf
= ω
m
ω
P
= 50. Où ω
m
et ω
P
sont
respectivement les vitesses de rotation du moteur et du pignon. Le rendement de ce réducteur est de
η = 50%. C'est-à-dire que la puissance à la sortie du réducteur (c
P
.ω
P
) est égale à 50% de la puissance à
l’entrée de ce réducteur (c
m
.ω
m
). Calculer la valeur numérique de K
Red
le gain du réducteur. .
K
Red
= c
P
c
m
=

Sciences Industrielles de l’Ingénieur CPGE - Saint Stanislas - Nantes
TP 2-1 Cordeuse.doc page 5/
7
6- Gain de la transmission Pignon Chaîne
5.1- Le rayon du pignon est r. Quelle distance est parcourue par le chariot pour un tour du pignon ?
5.2- En déduire la vitesse linéaire v du chariot en fonction de la vitesse de rotation ω
P
du pignon.
5.2- On suppose que le rendement de la transmission pignon chaîne est de 1. C'est-à-dire que la
puissance sur le chariot (f
R
.v) est égale à la puissance sur le pignon (c
P
.ω
P
). On donne r = 10 mm.
La transmission est un gain pur K
T
. Calculer la valeur numérique en m
−1
de ce gain.
K
T
= f
R
c
P
=
6- Fonction de transfert du moteur
6.1- On adopte pour le moteur à courant continu les notations suivantes :
Inductance de l’induit L Constante électrique K
E
Résistance de l’induit R
Constante mécanique (de couple)
K
M
Inertie équivalente des pièces
en mouvement ramenée sur
l’arbre du moteur J
Intensité traversant l’induit i(t)
Force contre électromotrice e(t)
Coefficient de frottement visqueux
des pièces en mouvement ramené
sur l’arbre du moteur f
Ecrire les quatre équations temporelles qui régissent le fonctionnement du moteur à courant continu,
puis les passer dans le domaine de Laplace (Les conditions initiales sont nulles).
Domaine temporel :
Equation électriques : Equation du couple :
Equation mécanique : Equation de la fcem :
Domaine de Laplace :
Equation électriques : Equation du couple :
Equation mécanique : Equation de la fcem :
6.2- En vous aidant de ces équations dans le domaine de Laplace et en supposant que le frottement
visqueux est négligeable (f ≈
≈≈
≈ 0) compléter le schéma bloc du moteur ébauché ci-dessous :
+-
U
m
(p)
E(p)
I(p) C
m
(p)
Ω
m
(p)
 6
7
6
7
1
/
7
100%