l`analyse du mouvement

1
qwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcv
bnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjkl
zxcvbnmqwertyuiopasdfg
hjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyu
iopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwe
rtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnm
rtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnm
qwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcv
bnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjkl
zxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmrtyuiopasdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiop
asdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwerty
uiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmq
wertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvb
nmrtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvb
nmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklz
xcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfg
hjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmrtyuiopasdfghjklzxcvbnmqwertyuiopa
sdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyu
iopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwe
rtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnm
qwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcv
bnmrtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcv
bnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjkl
zxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdf
ghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiop
asdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmrtyuiopasdfghjklzxcvbnmqwertyuiop
asdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwerty
uiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmq
wertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvb
nmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklz
xcvbnmrtyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklz
xcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfg
hjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopasdfghjklzxcvbnmqwertyuiopa
L’ANALYSE DU MOUVEMENT
Sommaire
A. Biomécanique du muscle
1. Architecture du muscle
2. Section physiologique
B. Etude biomécanique du geste
1. Analyse du geste
2. Notion d’avantage mécanique
3. Efficacité du mouvement
4. Les différents leviers
5. Etude du mouvement
Conclusion

2
L’ANALYSE DU MOUVEMENT
A . Biomécanique du muscle
1) Architecture du muscle
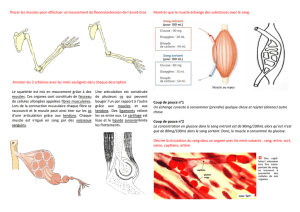
a. 2 sortes de muscle
- le muscle fusiforme
Les fibres musculaires sont groupés longitudinalement , elles sont
généralement longues et parallèles et vont d’une extrémité tendineuse à
l’autre .
- le muscle penniforme
Les fibres sont courtes et s’insèrent obliquement d’une extrémité
tendineuse à l’autre .
b. 4 catégories de muscle
- le muscle long ( ex : biceps )
- le muscle large ( ex : oblique)
- le muscle court (ex : carré pronateur , en général proche d’une
articulation )
- le muscle orbiculaire ( ex : anus )
Selon l’orientation des fibres et la disposition des insertions , les muscles
agissent dans une ou plusieurs directions
→ ex : les muscles abdominaux
Le ‘grand droit’ a des fibres orientées dans une seule direction
⤇ flexion du tronc
A l’inverse le ‘grand oblique’ a des fibres disposées en éventail
⤇ flexion , rotation et inclinaison du tronc

3
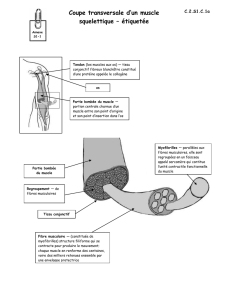
2) Section physiologique
La force musculaire est proportionnelle à la section physiologique du
muscle ( plan qui coupe les fibres de manière perpendiculaire ) .
Pour 1 cm² de fibres , le muscle développe une force de 5 à 10 kg .
a. Muscle fusiforme
Les fibres sont strictement longitudinales , la section géométrique A sera la
somme des filaments d’actine et de myosine .
→ Si A = 6 cm² , F = 5kg /cm² Fm = 6x5 = 30 kg
A
b. Muscle penniforme
Par rapport à l’axe du muscle , on doit mesurer A₁
A₁ et A₂ pour avoir la somme des filaments
d'actine et de myosine . A = A₁ + A₂
Si A₁ = 8 cm² et A₂ = 4 cm² alors A = 12 A₂
⤇ F = 12 x 5 = 60 kg
A masse musculaire identique , les muscles penniformes sont donc plus
puissants .
Pour développer la force d’un individu , il faut augmenter la section du
muscle ( hypertrophie ) .
B . Etude biomécanique du geste
Afin de faciliter l’étude du corps en mouvement , on réduit l’appareil
squelettique à un système de tige articulée de 14 segments :
tête , cou , 2 avant-bras , 2 bras , 2 mains , 2 cuisses , 2 jambes , 2 pieds

4
Pour aborder l’étude biomécanique , il faut comprendre la notion de ‘levier’.
Un levier est un système rigide ( os ) sur lequel va agir une force ( puissance
musculaire ) pour vaincre une résistance ( charge – poids du corps ) en
prenant appui sur un point fixe .

5
1. Analyse du geste
Pour l’analyse du geste , il faut :
- décrire le déplacement de la pièce osseuse
- situer le point d’appui fixe autour duquel cette pièce se déplace
- situer , sur la pièce osseuse , le point d’application et la direction de la
force qui s’oppose , qui résiste au déplacement
- en déduire le point d’application et la direction de la force , de la
puissance musculaire employée pour vaincre cette résistance
ex : flexion de l’avant-bras sur le bras
→ L’avant-bras ( os : radius /cubitus ) est le bras de levier qui se déplace
vers le haut
→ L’articulation du coude représente le point d’appui A
→ La résistance R est la charge qu’on tient dans la main , la force est située à
l’extrémité de l’avant-bras dirigé vers le bas qui s’oppose au mouvement
bras
F
avant-bras
A
R
Pour vaincre cette résistance , il faut une force dirigée vers le haut à
l’extrémité supérieure de l’avant-bras .
Il existe 2 muscles qui peuvent agir : le biceps brachial et le biceps antérieur
 6
7
8
9
6
7
8
9
1
/
9
100%