Cinématique du point

Cinématique du point page 1 / 2
cinématique du point.doc
Cinématique du point
Les grandeurs cinématiques que l’on peut associer au point sont : vitesse et accélération.
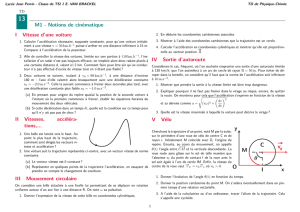
1. Définitions qualitatives à partir de la trajectoire.
On connaît la trajectoire du point A dans le mouvement de 2 par rapport à 1.
• Vitesse : →
vA,2/1
La vitesse est une grandeur qui donne des informations sur l’évolution de la position d’un point par
rapport au temps. Unité : le mètre par seconde (m.s-1 ou m/s)
Elle doit exprimer la direction instantanée du déplacement du point, le sens du déplacement ainsi que
l’amplitude de la variation de déplacement (appelé couramment vitesse).
Conclusion :
La vitesse est une grandeur vectorielle dont la direction est tangente à la trajectoire du point.
• Accélération : →
aA,2/1
l’accélération c’est la vitesse de la vitesse (plus la vitesse augmente vite, plus l’accélération est élevée).
Unité : le mètre par seconde carré (m.s-2 ou m/s²)
• L’accélération est aussi une grandeur vectorielle dont on ne peut pas simplement généraliser la
direction par rapport à la trajectoire.
Remarque : La détermination de l’accélération est utile, car c’est la grandeur qui permettra de relier les
mouvements avec les causes qui les produisent. (Dynamique)
TA,2/1
t3
t2
t1
t0 = 0
O
A
→
vA,2/1

Cinématique du point page 2 / 2
cinématique du point.doc
2. Calcul vectoriel.
2.1 Position du point A dans le mouvement de 2 par rapport à 1.
Elle est définie par le vecteur →
O1A .
Le paramétrage doit être compatible avec la condition : O1 est fixe dans 1 et A est fixe dans 2.
Il ne faut pas projeter →→
OA sur une base « fixe » (coordonnées)
2.2 Vitesse du point A dans le mouvement de 2 par rapport à 1.
→
vA,2/1 = t2→t1
lim
→
At2At1
t2 - t1 = t2→t1
lim
→
O1At2 - →
O1At1
t2 - t1 =
d→
O1A
dt 1
résultat : →
vA,2/1 =
d→
O1A
dt 1
Pour pouvoir dériver dans 1 il faut que O1 soit fixe dans le solide 1
Pour avoir la vitesse du point A dans le mouvement de 2, A doit être fixe dans le solide 2
2.3 Accélération du point A dans le mouvement de 2 par rapport à 1.
→
aA,2/1 =
d→
vA,2/1
dt 1
→
aA,2/1 =
d² →
O1A
dt² 1
avec le point A fixe dans 2 et le point O1 fixe dans 1.
3. Dérivation d’un vecteur / temps : relation de Boor.
d→
U
dt 1 =
d→
U
dt 2 + →
Ω2/1 ^ →
U
• Définition de →→
ΩΩ2/1 :
c’est le vecteur vitesse de rotation du solide 2 par rapport au solide 1 (en rad/s).
Si la position de 2 est défini dans 1 par n rotations autour des directions →
zi (voir figures planes)
→
Ω2/1 = ∑
i = 1
n
θi
.→
zi
• Composition des vecteurs vitesse de rotation : à l’aide de la relation de Boor
→
Ωn/1 = →
Ωn/n-1 + … + →
Ω3/2 + →
Ω2/1 On montre alors : →
Ω2/1 = - →
Ω1/2
1
/
2
100%