Exercice A3 - GdR Robotique

Module L3 « introduction à la mécatronique Introduction à la modélisation des
mécanismes
Exercices : Cinématique du point 3
1. Problème de cinématique du point
Un point M d écrit une hélice circulaire d’axe Oz (mouvement hélicoïdal dans Ro).
Ses équations horaires dans Ro sont :
x(t) = a cos(θ)
y(t) = a sin(θ)
z(t) = h.θ
a est le rayon du cylindre de révolution sur lequel est tracé l’hélice, h est une constante
(appelée le pas de l’hélice) et θ l’angle que fait avec Ox la projection OM’ de OM sur
Oxy.
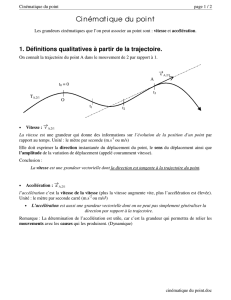
1. Faites un dessin représentant Ro, Rcyl, la position, la vitesse et la trajectoire de M.
2. Donner en coordonnées cartésien les expressions de la vitesse en fonction du temps
3. Donner en coordonnées cartésiennes les expressions de l’accélération en fonction de t
4. Montrer que le vecteur vitesse fait un angle constant avec le plan Oxy et le calculer.
5. Caractériser le vecteur accélération dans le cas ou la rotation θ est uniforme.
2. Mouvement cycloïdal uniforme
Il s’agit du mouvement d’un point M d’un cercle de rayon R, roulant sans glisser sur une
droite (O,x) (modèle de roue sur la route). Cela correspond à la superposition d’un
mouvement de translation uniforme du centre du cercle noté C (donc du cercle) à la
vitesse v selon l’axe x et d’un mouvement de rotation de centre C et de vitesse angulaire ω
tel que la vitesse du point de contact I soit nulle à tout instant (roulement sans glissement).
a) Calculer ω et établir les lois horaires de ce mouvement : OM(t), V(M)(t) et Γ(M)(t)
b) Quelle particularité possède le vecteur accélération ? De quel mouvement dépend-t-il ?
c) Représenter sur une période de la cycloïde les positions successives du point M sur le
cercle, son vecteur vitesse et son vecteur accélération.
Enseignements CNB – Axe Génie Industriel Olivier CHOCRON, MCF
1
/
1
100%