TD M7 : Eléments de dynamique d`un solide et d`un système

Mécanique – Deuxième partie
Page 1 sur 14
TD M7 : Eléments de dynamique d’un solide et d’un système
déformable

Mécanique – Deuxième partie
Page 2 sur 14
TD M7 : Eléments de dynamique d’un solide et d’un système
déformable
But du chapitre
• Etendre les résultats de dynamique et d’énergétique concernant les points matériels à des
systèmes formés d’un nombre quelconque de points.
• Etudier le mouvement d'un solide en rotation autour d’un axe.
Plan prévisionnel du chapitre
I – Solide et système déformable
• Distinguer un solide d’un système déformable.
II – Rappels de la cinématique du solide vue dans le chapitre M1
1°) Translation d’un solide
• Reconnaitre et décrire une translation rectiligne, une translation circulaire.
2°) Rotation d’un solide autour d’un axe fixe
• Dans le cas d’une rotation autour d’un axe fixe, décrire la trajectoire d’un point quelconque
d’un solide et exprimer sa vitesse en fonction de sa distance à l’axe et de la vitesse
angulaire.
III – Loi de la quantité de mouvement
1°) Quantité de mouvement d’un système
• Savoir que la quantité de mouvement d’un système de masse m et de centre d’inertie G en
mouvement dans le référentiel R s’écrit
/
/
( )
R
R
p mv G
=
.
2°) Loi de la quantité de mouvement
• Savoir que l’application de la loi de la quantité de mouvement à un système non ponctuel
permet de prévoir uniquement le mouvement du centre d’inertie G du système.
IV – Loi du moment cinétique
1°) Moment cinétique d’un système
• Ecrire le moment cinétique par rapport à un point A d’un système de n points matériels Mi.
• Ecrire le moment cinétique par rapport à un axe orienté d’un système de n points matériels
M
i
.
• Dans le cas d’un solide en rotation autour d’un axe, exprimer le moment d’inertie
J
∆
du
solide par rapport à l’axe ∆.
• Relier qualitativement le moment d’inertie à la répartition des masses.
• Dans le cas d’un solide en rotation autour d’un axe, exprimer le moment cinétique scalaire
L
∆
du solide en fonction de
J
∆
et de la vitesse angulaire de rotation
ω
du solide autour de
l’axe ∆.
• Maitriser le caractère algébrique du moment cinétique scalaire.
• Exploiter la relation pour le solide entre le moment cinétique scalaire, la vitesse angulaire de
rotation et le moment d’inertie fourni.

Mécanique – Deuxième partie
Page 3 sur 14
Raisonnement du cours n°1 : On considére un solide en rotation à la
vitesse angulaire
(
)
t
ω
autour de l’axe
(
)
A,
u
∆
∆ =
. Chaque point
M
i
(masse m
i
) du solide a une trajectoire circulaire, parcourue à la
vitesse angulaire
ω
. On note
H
i
étant le projeté orthogonal de
M
i
sur
l’axe
∆
,
H M
i i i
r
=
la distance du point
M
i
à l’axe
∆
, et on utilise
la base cylindrique
(
)
, ,
r
u u u
θ
∆
.
1°) Exprimer le vecteur vitesse
i
v
et le vecteur position
i
AM
du point
M
i
(r
i
; z
i
) dans la base cylindrique
(
)
, ,
r
u u u
θ
∆
.
2°) Exprimer le moment cinétique du point Mi par rapport à A
( )
A i
L M
.
3°) Exprimer le moment cinétique du point Mi par rapport à l'axe ∆
L ( )
i
M
∆
.
4°) Exprimer le moment cinétique du solide par rapport à l'axe ∆
L
∆
.
On peut écrire
L J
ω
∆ ∆
= où
J
∆
est le moment d'inertie du solide.
5°) Quelle est la dimension de
J
∆
? Quelle est son unité dans le système international d'unités ?
6°) Exprimer
J
∆
.
2°) Moment des forces qui s’exercent sur un système
• Calculer le moment d’une force par rapport à un axe orienté en utilisant le bars de levier.
• Définir un couple.
• Définir une liaison pivot et justifier le moment qu’elle peut produire.
• Savoir qu’un moteur ou un frein contient nécessairement un stator pour qu’un couple puisse
s’exercer sur le rotor.
3°) Loi vectorielle
• Enoncer la loi du moment cinétique par rapport à un point fixe A dans le cas d’un système
fermé non ponctuel.
4°) Loi scalaire
• Enoncer la loi du moment cinétique par rapport à axe orienté fixe dans le cas d’un système
fermé non ponctuel.

Mécanique – Deuxième partie
Page 4 sur 14
5°) Application à un solide en rotation autour d’un axe fixe
• Ecrire la loi du moment cinétique par rapport à axe orienté fixe dans le cas d’un solide en
rotation autour d’un axe fixe.
6°) Application au pendule pesant
• Établir l’équation du mouvement.
• Expliquer l’analogie avec l’équation de l’oscillateur harmonique.
• Établir une intégrale première du mouvement.
• Lire et interpréter le portrait de phase : bifurcation entre un mouvement pendulaire et un
mouvement révolutif.
• Approche numérique : utiliser les résultats fournis par un logiciel de résolution numérique
ou des simulations pour mettre en évidence le non isochronisme des oscillations.
Raisonnement du cours n°2 : Un exemple simple de solide en pivot
parfait est le pendule pesant. Il s’agit d’un solide, pouvant osciller
librement autour d’un axe horizontal
∆
.
Sa position est repérée par l’angle
θ
entre la verticale et le vecteur
OG
.
Imaginons qu’initialement le solide soit lâché sans vitesse initiale
avec un angle
0
θ
. Il va alors effectuer des oscillations autour de la
position
0
θ
=
. Nous allons mettre en œuvre les notions étudiées
précédemment.
1°) Exprimer les moments des actions qui s'exercent sur le solide par rapport à l'axe ∆.
Rappel important : Le signe de
(
)
F
∆
M
correspond au sens dans lequel
F
tend à faire tourner
M
autour de
(
)
,
∆
∆
e
.
(
)
0
F
∆
>
M
si
F
a tendance à faire tourner
M
dans le sens direct
autour de l’axe.
(
)
0
F
∆
<
M
si
F
a tendance à faire tourner
M
dans le sens indirect autour de
l’axe. Si
(
)
0
F
∆
=
M
, la force n’a pas tendance à faire tourner
M
autour de
∆
. Dans ce cas,
F
est soit parallèle à l’axe, soit dirigée vers celui-ci.
2°) Établir l’équation du mouvement.
3°) Expliquer l’analogie avec l’équation de l’oscillateur harmonique.
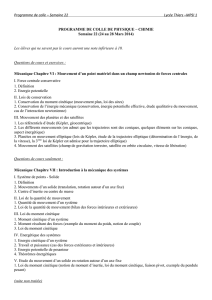
Une résolution numérique de l'équation du mouvement pour différentes vitesses angulaires initiales
a permis de tracer les courbes suivantes :

Mécanique – Deuxième partie
Page 5 sur 14
.
4°) Commenter les courbes tracées ci-dessus en vous interessant en particulier à l'isochronisme des
oscillations et à la courbe grise.
Une résolution numérique de l'équation du mouvement pour différentes vitesses angulaires initiales
a permis de tracer le portrait de phase du pendule pesant
(1)
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%