06_Connexite - Nouvelles de Hugues Talbot





Chemin
Chemin
Définition
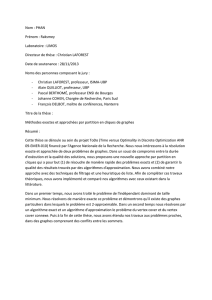
Soit G = (E,Γ) un graphe, et soient x et y deux sommets dans E
Un chemin de xày(dans G)est une séquence
ordonnée π= (x0,...,x`)de sommets de E telle que
∀i∈ {1, . . . , `}, xi∈Γ(xi−1)
x0=x et x`=y
Si π= (x0,...,x`)est un chemin, `est sa longueur
2
3
4
1
Exemple
π= (1,2,3)est un chemin
de
longueur 2
J. Cousty & H. Talbot : Morpho, graphes et imagerie 3D 4/24
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
1
/
54
100%