Télécharger le fichier - Fichier

information
les notes de séminaires de l’année passée sont
reportées
1

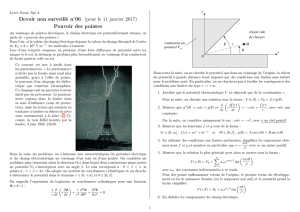
essayons d’appliquer ce que nous savons
2

Grande'aiguille,'petite'aiguille.'
Quel%angle%forment%les%aiguilles%d'une%montre%à%7h38?
petite'aiguille':'mouvement'circulaire'uniforme
grande'aiguille':'mouvement'circulaire'uniforme
période'de'la'petite'aiguille':'T'='12'heures
période'de'la'grande'aiguille':'T'='1'heure
en'radians'
en'degrés'
3

Il'manque'quelque'chose????
Qui'n’est'pas'dit'dans'l’énoncé'
mais'qui'est'implicite
“après'un'tour'les'angles'
recommencent'à'0”
angle'en'degrés
temps'en'heures
4

mais'Modulo'360
Grande'aiguille,'petite'
aiguille.'
Quel%angle%forment%
les%aiguilles%d'une%
montre%à%7h38?
entre'7h'et'8h'quelles'
sont'les'équations?
angle=219*218=1°
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%