PDF version - Sciencesconf.org

CSMA 2017
13ème Colloque National en Calcul des Structures
15-19 Mai 2017, Presqu’île de Giens (Var)
Association des méthodes MFS et PGD pour la résolution des pro-
blèmes transitoires
A. Sogah1,2, K. Kpogan1,2, A. Tri3, N. Mathieu1,2, H. Zahrouni1,2, M. Potier-Ferry1,2
1LEM3, Université de Lorraine, {amen-amevi.sogah, kekeli.kpogan, norman.mathieu, hamid.zahrouni, michel.potier-ferry}@univ-lorraine.fr
2Labex DAMAS, Université de Lorraine, France
3Laboratoire de Mécanique/FSAC-ISEM de Casablanca, Maroc, [email protected]
Résumé — On propose dans ce travail un algorithme associant la méthode des solutions fondamentales
(MFS) et la méthode de décomposition propre généralisée (PGD) pour résoudre l’équation de la chaleur
en régime transitoire. La méthode PGD, moyennant une séparation de variables, permet de décomposer
le problème original en un problème en temps résolu par la méthode classique de Runge-Kutta et un
autre en espace approché par la méthode sans maillage MFS. Pour montrer l’efficacité de cet algorithme,
deux exemples sont présentés dans ce travail et leurs résultats sont comparés aux solutions de référence.
Mots clés — Décomposition Propre Généralisée (PGD), Méthode sans maillage, Méthode des Solutions
Fondamentales (MFS), Problème transitoire de la chaleur.
1 Introduction
Dans ce papier, on propose de combiner la méthode sans maillage basée sur la méthode des solutions
fondamentales et la méthode de décomposition propre généralisée pour résoudre les équations aux déri-
vées partielles instationnaires et en particulier celles qui gouvernent le problème transitoire de la chaleur.
Pour les problèmes instationnaires, la communauté des utilisateurs des solutions fondamentales dans le
cadre des méthodes sans maillage suivent deux voies possibles. La première consiste à utiliser une trans-
formée de Laplace et la seconde utilise directement des solutions fondamentales dépendantes du temps
[4, 5, 6]. Dans le présent travail, on propose une troisième alternative qui consiste à coupler la méthode
MFS avec la méthode PGD. Cette dernière, moyennant une séparation entre le temps et l’espace, per-
met de réécrire l’équation originale en deux problèmes couplés l’un en temps et l’autre en espace. La
résolution se fait en premier lieu avec une approximation de l’espace par la méthode MFS sachant que
la fonction en temps est supposée connue. L’équation différentielle en temps est ensuite résolue par une
méthode classique de Runge-Kutta. La méthode PGD appartient aux méthodes de réduction de modèles
permettant de réduire la dimensionnalité du problème physique étudié. Chinesta et al. [3] ont largement
contribué au développement de cette technique dans divers domaines des sciences de l’ingénieur. Dans
une récente référence, Bonithon et al. [1] ont couplé la PGD et la méthode BEM (Boundary Element Me-
thod). La différence avec la présente étude réside essentiellement dans l’utilisation de la méthode MFS
et par conséquent de la forme forte des équations bien appropriée au contexte de la méthode MFS. Après
une introduction, on présente la formulation du problème de la chaleur instationnaire ainsi que le prin-
cipe de la méthode PGD suivi d’une courte description de la méthode MFS. Enfin, au travers d’exemples
numériques, nous montrons l’efficacité de l’algorithme proposé.
2 Formulation du problème et la méthode PGD
On considère le problème transitoire de la chaleur avec les conditions aux limites et initiale suivantes :
∂u(x,y,t)
∂t−k∆u(x,y,t) = f(x,y,t)dans Ω×τ
u(x,y,t0) = g(x,y)dans Ω
u(x,y,t) = h(x,y,t)sur ∂Ω ×τ
(1)
1

avec Ωun domaine dans l’espace R2,∂Ω sa frontière, τ= [t0,tmax]l’intervalle de temps, ule champ de
température, kle coefficient de conductivité thermique constant, f,get hsont des fonctions données.
Dans le cadre de la méthode PGD, la solution du problème (1) est recherchée sous la forme de la somme
de couples, constitués du produit d’une fonction spatiale φiet d’une fonction temporelle Ti, c’est à dire :
u(x,y,t)≈un=
n
∑
i=1
φi(x,y)Ti(t) =
n−1
∑
i=1
φi(x,y)Ti(t) + φn(x,y)Tn(t)(2)
Connaissant les (n−1)premiers couples, nous allons décrire l’algorithme permettant de déterminer les
fonctions φnet Tn. Pour simplifier l’écriture, on réécrit {φn,Tn}={φ,T}et on introduit la fonction poids
supposée égale à u∗=φT∗+φ∗T. L’équation (1) est alors décomposée en deux équations, l’une pour
chercher la fonction d’espace φ(x,y)et l’autre permet de déterminer le champ en temps T(t). En effet,
la stratégie pour calculer le couple {φ,T}se fait en deux étapes. Premièrement, on considère que Test
connue et on détermine φen résolvant le système suivant :
−kαt∆φ(x,y) + βtφ(x,y) = hf(x,y,t),T(t)i −
n−1
∑
i=1−kαi
t∆φi(x,y) + βi
tφi(x,y)dans Ω
αtφ(x,y) = hh(x,y,t),T(t)i −
n−1
∑
i=1
αi
tφi(x,y)sur ∂Ω
(3)
où
αt=hT,Ti;αi
t=hTi,Tii=1,..., n−1;
βt=hdT
dt,Ti;βi
t=hdTi
dt,Ti(4)
On note que h·,·i représente le produit scalaire. L’équation (3) est alors résolue par la méthode sans
maillage MFS. Par ailleurs, d’autres techniques appropriées peuvent être utilisées. Deuxièmement, une
fois que la solution φest connue, nous déterminons T(t)en résolvant le système suivant :
αx
dT(t)
dt−kβxT(t) = hf(x,y,t),φ(x,y)i −
n−1
∑
i=1αi
x
dTi(t)
dt−kβi
xTi(t)
αxT(t0) = hg(x,y),φ(x,y))i −
n−1
∑
i=1
αi
xTi(t0)
(5)
où (αx=hφ(x,y),φ(x,y)i;αi
x=hφi(x,y),φ(x,y)i,i=1,...,n−1;
βx=h∆φ(x,y),φ(x,y)i;βi
x=h∆φi(x,y),φ(x,y)i(6)
Le système (5) est alors résolu par la méthode de Runge-Kutta.
3 La méthode MFS
Dans cette section, nous proposons de résoudre par MFS le problème (3) pris sous la forme générique
suivante à chaque pas,
(∆φ(x,y) + γ(x,y)φ(x,y) = F(x,y)dans Ω
φ(x,y) = B(x,y)sur ∂Ω (7)
Les fonctions Fet Bsont données. Le système (7) représente des EDP avec des opérateurs différentiels
à coefficients variables et dont la solution fondamentale n’est pas disponible. Pour la résolution de ce
système, la méthode des équations analogues (AEM) est utilisée pour le transformer en un problème de
Poisson standard. Ceci consiste à maintenir le Laplacien, dont la solution fondamentale est connue, à
gauche et les autres termes sont déplacés au second membre. L’équation (7) devient alors,
2

(∆φ(x,y) = −γ(x,y)φ(x,y) + F(x,y) = H(x,y,φ)dans Ω
φ(x,y) = B(x,y)sur ∂Ω (8)
qui est facilement résolue par la méthode MFS si la fonction Hest connue. Or Hdépend de l’inconnue φ,
d’où la nécessité de la méthode MFS-MPS (MPS : méthode des solutions particulières). L’idée suppose
que la solution d’une EDP combine simultanément la solution particulière et la solution homogène. Ceci
permet d’écrire cette solution sous la forme suivante :
φ(x,y)≈˜
φ=
Nd
∑
i=1
ηiv(ri) +
Ns
∑
j=1
θjG(ρj)(9)
où Ndet Nsreprésentent respectivement les points d’interpolation à l’intérieur du domaine Ωet le nombre
de points sur la frontière Γ. Les coefficients {ηi}Nd
i=1et{θj}Ns
j=1sont des inconnus à déterminer. La
fonction v(r)représente la solution particulière de l’opérateur de Laplace défini par :
∆v(r) = ϕ(r)(10)
où la ϕ(r)est la fonction de base radiale qui permet d’approcher le second membre de la première
équation (8), ainsi :
H(x,y,φ) =
Nd
∑
i=1
ηiϕ(ri)(11)
où ri=k(x,y)−(xi,yi)k,(xi,yi)i=1..Ndsont des points de collocation dans le domaine. On note également
que :
G(ρj) = −1
2πlog(ρj)(12)
est la solution fondamentale du Laplacien pour le problème 2D caractérisé par,
∆G(ρ) = 0 (13)
Les ρj=k(x,y)−(xsj,ys j)k,(xsj,ys j)j=1..Nsreprésentent les points sources pris sur la frontière fictive Γ
contenant le domaine Ω. Au lieu de chercher la solution particulière et la solution homogène séparément,
nous avons l’intention d’obtenir les coefficients {ηi}Nd
i=1et{θj}Ns
j=1simultanément. En introduisant (9)
dans (8), on a :
Nd
∑
i=1
ηiΨ(ri) +
Ns
∑
j=1
θjΘ(ρj) = F(x,y)dans Ω(14)
telles que :
Ψ(ri) = ∆v(ri) + γ(x,y)v(ri) = ϕ(ri) + γ(x,y)v(ri)(15)
et
Θ(ρj) = ∆G(ρj) + γ(x,y)G(ρj) = γ(x,y)G(ρj)(16)
Les fonctions Ψ(r)et Θ(ρ)sont connues. L’efficacité et la précision de l’interpolation dépendent du
choix des fonctions de base radiale ϕ. En effet, les polynômes de Lagrange, les interpolants de Fourier,
les fonctions radiales polynomiales, les thin plate splines (TPS) ainsi que les fonctions multi-quadriques
(MQ) peuvent être utilisés. Dans ce travail, on propose d’utiliser les fonctions de base radiales multi-
quadriques suivantes :
ϕ(r) = pc2+r2(17)
D’où
v(r) = 1
9(4c2+r2)pc2+r2−c3
3log(c+pc2+r2)(18)
En 2D, le paramètre cest une constante choisie égale à 1.
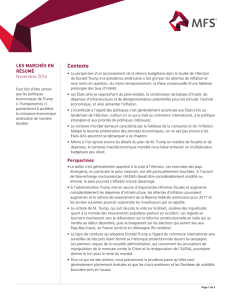
Pour la mise en œuvre de cette technique, nous choisissons Ndpoints intérieurs dans le domaine Ω,Nb
3

points sur la frontière ∂Ω et Nspoints sources sur la frontière fictive Γ. Par collocation, on obtient un
système d’ordre (Nd+Ns)×(Nd+Nb)à résoudre :
Ψ(ri j)Θ(ρi j)
v(ri j)G(ρi j) η
θ=F
B(19)
Une fois que les coefficients {ηi}Nd
i=1et{θj}Ns
j=1sont déterminés en résolvant le système (19), la solution
approchée est obtenue à partir de (9)
C
RCollocation points
Domain
Ω
Boundary domain
d
N
b
N
s
N
Γ
∂Ω
Fictitious boundary
FIGURE 1 – Points de collocation, domaine Ω, bord réel ∂Ω et bord fictif Γ.
4 Exemples Numériques
Pour montrer l’efficacité de l’algorithme développé dans les sections précédentes, on résout l’équa-
tion de chaleur en régime transitoire pour différentes fonctions sources, géométries et conditions initiales
et aux limites. La convergence de la méthode PGD et celle de la méthode MFS en fonction d’un certain
nombre de paramètres seront présentées et en particulier, on va étudier l’influence des paramètres R,Ns
et Nd. On note que ntreprésente le nombre de pas de discrétisation en temps et nφTest le nombre d’enri-
chissement correspondant au nombre de couple {φ,T}nécessaire pour obtenir une bonne approximation
de la solution. Pour s’assurer d’avoir une meilleure solution, on détermine les erreurs suivantes :
en=kun−uexact k
kuexact k(20)
et
En=|un−uexact |
kuexact k(21)
4.1 Exemple 1 : Fonction source constante
Dans ce test, on considère un domaine carré Ω= [0,1]×[0,1]avec des conditions initiales et aux
limites homogènes. Dans ce problème la fonction source f(x,y,t)est choisie égale à 1 et la solution
exacte est donnée alors par :
uexact =Z0.3
0Z1
0Z1
0
˜
G(x,y,¯x,¯y,t−¯
t)d¯xd ¯yd¯
t
avec ˜
G(x,y,¯x,¯y,ξ) = 4∑∞
i=1∑∞
j=1sin(iπx)sin(iπy)sin(iπ¯x)sin(iπ¯y)exp(−π2(i2+j2)ξ)
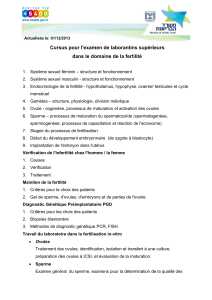
Pour étudier l’influence des différents paramètres de discrétisation MFS, nous avons calculé l’erreur
enen fonction de R,Nset Nd. Sur la figure 2, on reporte l’erreur enen fonction du rayon de la frontière
fictive Ren fixant Nd=45 pour Ns=12 et Ns=30. On constate qu’on a une bonne approximation de
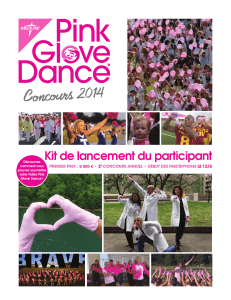
la solution à partir de R=2 et l’erreur se stabilise autour de 10−5au-delà de R=5. La figure 3 montre
qu’en fixant Ret Nd, l’erreur endiminue lorsque Nsaugmente. De même, on remarque d’après la figure 4
que l’erreur ens’améliore en augmentant le nombre de point Ndet se stabilise autour de Nd=50. A noter
4

que les calculs MFS sont donnés pour un nombre d’enrichissement nφT=2. Pour étudier l’influence
de cet enrichissement, on a fixé les paramètres MFS et on a tracé sur la figure 5, l’erreur relative En
pour différentes valeurs nφT. On remarque pour t=0.015sque, Enest de l’ordre de 10−1pour nφT=1
et atteint 3.10−3pour nφT=8 pour se stabiliser autour de 10−3pour nφT≥10. L’erreur PGD diminue
lorsque nφTaugmente. On conclut alors que l’erreur diminue lorsque les points de collocation Nd, les
points source Nset le nombre d’enrichissement nφTaugmentent avant saturation.
FIGURE 2 – L’erreur relative enen fonction du rayon Rde la surface fictive (Nd=45)
FIGURE 3 – L’erreur relative enen fonction du nombre de points source Ns(Nd=45)
5
 6
7
8
6
7
8
1
/
8
100%