4635 Servomoteurs pour volets d`air GIB16...1

Landis & Staefa CM2N4635F Janvier 1998 1/12
4635
Servomoteurs
pour volets d'air GIB16...1
A mouvement rotatif, à action progressive, 24 V~
Servomoteurs électriques rotatifs, couple nominal 35 Nm, tension de fonctionne-
ment 24 V~ à action progressive avec des signaux de commande 0...10 V−−. Signal
de recopie de position 0...10 V−−. Plage de travail réglable mécaniquement entre 0
et 90°, précâblé (longueur de câble: 0,9 m).
Variantes spécifiques selon les types avec contacts auxiliaires pour fonctions
supplémentaires, par exemple pour l'affichage de position.
Ces servomoteurs sont utilisés dans des installations de ventilation et de climatisation à
débit d’air constant ou variable (VAV) pour manoeuvrer des registres d’air ou des cla-
pets.
• Le couple nominal de 35 Nm permet, selon la facilité de manoeuvre des registres,
d’actionner des surfaces de volets pouvant aller jusqu’à environ 6 m2.
• Raccordement à des régulateurs à signal de sortie progressif 0...10 V–.
• Le sens de rotation du servomoteur est sélectionné à l’aide d’un commutateur.
• Dès que l’appareil reçoit un signal (> 0 V), il se déplace dans le sens « 90° ». Si le si-
gnal de commande adopte une valeur constante, l’appareil maintient les clapets dans
la position correspondante.
• En l’absence de signal de commande, l’appareil sous tension revient en position «0».
• Lorsque l’alimentation est coupée, l’appareil reste dans la position atteinte mais adopte
un couple d’arrêt réduit.
• Mécanique : l’indicateur de position monté sur l’adaptateur de l’axe indique l’angle de
rotation du volet .
• Electrique : la partie électronique génère une tension de sortie 0...10 V– proportion-
nelle à l’angle de rotation 0...90°.
Domaines
d’application
Fonctions
Fonctions de base
Mouvement rotatif
Affichage de position

2/12 CM2N4635F Janvier 1998 Landis & Staefa
Afin de permettre une commande manuelle de l’appareil ou du volet, le servomoteur
peut-être débrayé à l’aide de la touche « PUSH ».Voir également la section « éléments
de réglage et de commande » du chapitre « Réalisation ».
L’angle de rotation maximal de l’adaptateur d’axe peut être réglé entre 0° et 90° par pas
de 5°.
Le point de départ et la plage de rotation (0...90°) peuvent être configurés au moyen de
deux potentiomètres (cf. « Technique »).Les servomoteurs disposant de ces fonctions
peuvent être utilisés pour les applications suivantes :
• Commande de volets avec limitation de course par exemple dans un intervalle de
0...45° pour la totalité de la plage du signal de commande 0...10 V.
• Organe de réglage séquentiel dans des boucles de réglage disposant uniquement d’un
signal de commande 0...10 V pour la commande de plusieurs séquences.
• Systèmes de régulation avec un signal de commande dérivé du 0...10 V, par exemple
2...10 V.
Des contacts auxiliaires permettent d'assurer des fonctions supplémentaires. Leur point
d’enclenchement respectif A et B peut être défini séparément dans la plage de rotation
0...90° par pas de 5°.
Voir également les rubriques « Technique », « Indications pour la mise en service » et
« Schéma des connexions ».
Alimentation 24 V~
Signal de
commande Modèle standard (point de départ et
plage de fonctionnement fixes) Modèle avec point de départ et
plage de fonctionnement ajustables
sans contact
auxiliaire avec contact
auxiliaire sans contact
auxiliaire avec contact
auxiliaire
0...10 V– GIB161.1E GIB166.1E GIB163.1E GIB164.1E
En raison des diverses possibilités de montage (en fonction de la longueur d’axe),
l’adaptateur d’axe muni de l’indicateur de position et le matériel de fixation sont livrés
avec le servomoteur sous forme de pièces détachées.
Les sets de montage suivants permettent de convertir le mouvement rotatif en mouve-
ment linéaire :
• Set de montage (plaque de fixation avec point d’appui externe) ASK71.1
• Set de montage (levier) ASK71.3
• Set de montage (levier et plaque de fixation) ASK71.4
Les servomoteurs sont livrés munis d’un câble de 0,9 m.
Les contacts auxiliaires et/ou les potentiomètres de réglage du point de départ et de la
plage de fonctionnement ne peuvent pas être intégrés après montage du servomoteur.
Veillez par conséquent à commander le modèle adéquat.
Les servomoteurs peuvent être raccordés à tout appareil de réglage et d’automatisme
délivrant un signal progressif 0...10 V– et satisfaisant aux prescriptions de sécurité.
Réglage manuel
sans courant
Limitation mécanique
de l’angle de rotation
Variante
Signal de commande ré-
glable (caractéristique)
Contacts auxiliaires
réglables
Références et
désignations
Livraison
Accessoires
Câble de raccordement
Remarque
Combinaisons
d’appareils

Landis & Staefa CM2N4635F Janvier 1998 3/12
Moteur à courant continu offrant un réglage précis de la vitesse et un contrôle du couple
fiable pour protéger l’appareil et les volets.
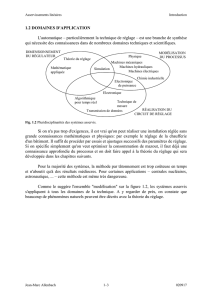
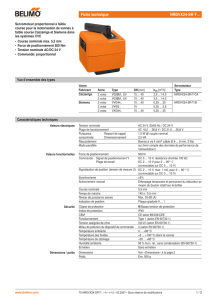
L’appareil est commandé par le signal de commande 0...10 V– d’un régulateur. L’angle
de rotation est proportionnel à ce signal. Le potentiomètre « Uo » permet de définir un
point de départ entre 0...5 V et le potentiomètre « ∆U » de régler la plage de fonction-
nement entre 2...30 V.
100
0
U
O
D
U (max. 30 V)
Y
U
[v]
Y
S
[%]
4637D01
2 5 10 35
2)1) 3)
Ys plage de réglage (100 % = angle de rotation 90°)
Yu signal de commande
Uo plage du point de départ
∆U plage de fonctionnement (pour Ys = 100 %)
1) Uo = 0 V, ∆U = 2 V point de départ = 0 V,
plage de fonctionnement min. pour Ys =
100%
2) Uo = 5 V, ∆U = 30 V point de départ max. = 5 V,
plage de fonctionnement max. pour Ys =
100%
3) Uo = 0 V, ∆U = 10 V réglage en usine
Uo
2
4
01
3
5
D
U
30
2
15
10
5
20
25
Uo
4637Z01
D
U
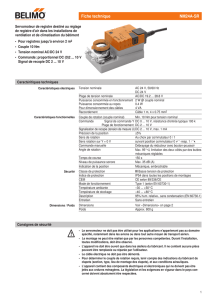
Un signal de commande compris entre Umin = 2 V et Umax = 10 V provoque une ouver-
ture de 0...50 % (= 45°).
Calcul de la valeur de réglage pour ∆U :
DUangle de r
angle de r
==
×
=
otation nominal en % (Umax - Umin)
otation effectif en %
(10 - 2) V
100
50 16
Uo = 2 V ; ∆U = 16 V
100
0
D
U (16 V)
Y
U
[v]
Y
S
[%]
4637D02
21810
U
min
U
max
50
U
o
Umin = signal de commande min. (point de départ)
Umax = signal de commande max. (position finale)
Technique
Moteur
Réglage de la caracté-
ristique (selon modèle)
Exemple :
Signal de commande
2 V...10 V–
Formule
Réglage des
potentiomètres

4/12 CM2N4635F Janvier 1998 Landis & Staefa
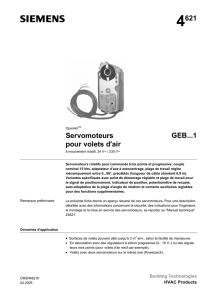
La figure suivante indique la relation entre les points d’enclenchement des contacts A et
B et l’angle de rotation.
Position de montage pour
l’adaptateur
d’axe/indicateur de posi-
tion
plage de fonctionne-
ment : sens des ai-
guilles d’une montre
Pas de réglage : 5°
Hystérésis de commuta-
tion : 2°
Plage de réglage des
contacts A et B
plage de fonctionne-
ment : sens contraire
aux aiguilles d’une
montre
Position de réglage pour
l’adaptateur
d’axe/indicateur de posi-
tion
AB
-2,5° 0° 10° 20° 30° 70° 80° 90° 92,5°
+2,5°
0° 10° 20° 30° 70° 80°
4636D01
92,5°90° 80° 70° 60° 20° 10° -2,5°
+2,5°
90°
0°
80
70
60
50
B
90
Aux Switch
Adjustment
20
30
40
10
20
40
A
70
4637Z07
Les axes de réglage des contacts tournent avec le servomoteur. Les échelles indiquées
s’appliquent uniquement à partir de la position initiale (0°) du servomoteur, lorsque la ro-
tation s’effectue dans le sens des aiguilles d’une montre.
Boîtier robuste entièrement métallique en fonte d’aluminium. Il garantit une durée de vie
élevée de l’appareil même sous les conditions les plus exigeantes.
Train d’engrenages sans entretien et silencieux, protégé contre les surcharges et les blo-
cages même en fonctionnement prolongé.
Le servomoteur est réglé en usine avec un angle de + 2,5°, afin d’assurer une pression
satisfaisante sur les volets.
La touche « PUSH » permet de débrayer l’appareil pour effectuer un réglage manuel.
Ce système en cours d’homologation permet de fixer différents diamètres et sections
d’axes (carrés, ronds) au moyen d’une seule vis. L’adaptateur peut être introduit de part
ou d’autre du manchon, en fonction de la longueur des axes de volets. Pour des axes
courts, il peut être posé sur la gaine.
L’adaptateur s’emboîte sur son support par engrenage.
L’angle de rotation maximal peut être réglé dans une plage 0...90° par pas de 5°.
Un commutateur situé à l’avant de l’appareil permet de sélectionner le sens de rotation.
Une barre perforée munie d’un boulon permet de fixer le servomoteur sur la face oppo-
sée au manchon.
Les appareils sont livrés avec un câble de raccordement monté de 0,9 m.
Contacts auxiliaires régla-
bles (selon modèle)
Remarque
Réalisation
Equipement de base
Boîtier
Train d’engrenages
Préréglage
Réglage manuel
Adaptateur d’axe
à autocentrage
Limitation mécanique
de l’angle de rotation
Réglage du sens
de rotation
Réglette anti-torsion
Raccordement
électrique

Landis & Staefa CM2N4635F Janvier 1998 5/12
Voir également les rubriques « Technique » et « Indications pour la mise en service » de
la présente notice.
1 Boîtier
2 Plage de fonctionnement 0°...90°
3 Potentiomètre de réglage de la
plage de fonctionnement
4 Potentiomètre de réglage de la
plage de positionnement initial
5 Sélecteur du sens de rotation
6 Câble d’alimentation et du
signal de commande
7 Câble de raccordement des
contacts auxiliaires
8 Touche de débrayage du train
d’engrenages
9,10 Axe de réglage des contacts A et B
11 Indicateur de position
12 Adaptateur d’auto-centrage
13 Anneau de sécurité de l’adaptateur
14 Adaptateur de l’indicateur de position
15 Réglette anti-torsion
4636Z03
13 12
4636Z05
11
4636Z02
12
13
14
4636Z04
11
Eléments de réglage
et de commande
4636Z01
A
B
12
11
10
9
6
4
3
2
1
15
90°
7
5
8
PUSH
Uo
2
4
01
3
5
DU
30
2
15
10
5
20
25
Disposition de
l’adaptateur pour axes
de volet longs
Disposition de
l’adaptateur pour axes
de volet courts
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%