4666 Servomoteurs pour volets d`air GBB16...2

Siemens Building Technologies CM2N4666F / 02.2001
Landis & Staefa Division 1/10
4666
OpenAir™
Servomoteurs
pour volets d’air GBB16...2
à mouvement linéaire, commande progressive 24 V~
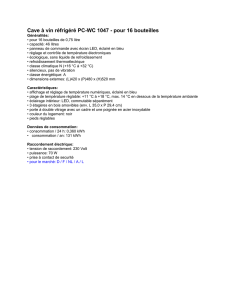
Servomoteur linéaire, force nominale 440 N, alimentation 24 V~, action progres-
sive pour signaux de commande 0...10 V–, signal de recopie de position 0...10 V–,
course nominale 70 mm, précâblé (longueur de câble : 0,9 m).
Variantes disponibles avec point de départ et plage de fonctionnement réglables
et/ou contacts auxiliaires pour fonctions supplémentaires.
Ces servomoteurs sont utilisés dans des installations de ventilation et de climatisation à
débit d’air constant ou variable (VAV) pour manoeuvrer des registres linéaires ou rotatifs.
• La force nominale de 440 N permet, selon la facilité de manoeuvre des registres,
d’actionner des surfaces de volets pouvant aller jusqu’à environ 4 m2.
• Raccordement à des régulateurs à signal de sortie progressif 0...10 V–.
• Un commutateur permet de sélectionner le sens de déplacement de la tige : entrée
ou sortie.
• Dès que le servomoteur reçoit un signal (> 0 V), la tige se déplace. Si le signal de
commande adopte une valeur constante, l’appareil maintient les clapets dans la posi-
tion correspondante.
• En l’absence de signal de commande, l’appareil sous tension ramène la tige à la po-
sition «0».
• Mis hors tension, l’appareil maintient les volets dans la dernière position atteinte mais
exerce une force de retenue réduite.
La partie électronique génère une tension de sortie 0...10 V proportionnelle à la course.
Afin de permettre une commande manuelle de la tige, le servomoteur peut-être débrayé
à l’aide de la touche «PUSH».Voir également la section «Eléments de réglage et de
commande» du chapitre «Réalisation».
Domaines
d'application
Fonctions
Fonctions de base
Mouvement linéaire
Affichage du
positionnement
Réglage manuel
sans courant

CM2N4666F / 02.2001 Siemens Building Technologies
2/10 Landis & Staefa Division
Le point de départ et la plage de la course (0...70 mm) peuvent être ajustés au moyen
de deux potentiomètres (voir section «Technique»). Les servomoteurs disposant de ces
fonctions peuvent être utilisés pour les applications suivantes :
• Commande de volets avec limitation de course par exemple dans un intervalle de
0...30 mm pour la totalité de la plage du signal de commande 0...10 V−.
• Organe de réglage séquentiel dans des boucles de réglage disposant uniquement
d’un signal de commande 0...10 V- pour la commande de plusieurs séquences.
• Systèmes de régulation avec un signal de commande dérivé du 0...10 V−, par exem-
ple 2...10 V−.
Des contacts auxiliaires A et B permettent d'assurer des fonctions supplémentaires.
Leur point d’enclenchement respectif peut être défini séparément dans la plage de
fonctionnement 0...70 mm par pas de 4mm.
Voir également les rubriques «Technique», «Indication pour la mise en service» et
«Schéma des connexions».
Alimentation 24 V~
Modèle standard (point de départ et
plage de fonctionnement fixes) Modèle avec point de départ et plage
de fonctionnement ajustables
sans contact
auxiliaire avec 2 contacts
auxiliaires sans contact
auxiliaire avec 2 contacts
auxiliaires
0...10 V−GBB161.2E GBB166.2E GBB163.2E GBB164.2E
Les contacts auxiliaires et/ou les potentiomètres de réglage du point de départ et de la
plage de fonctionnement ne peuvent pas être intégrés après montage du servomoteur.
Veillez par conséquent à commander le modèle adéquat.
Les servomoteurs sont livrés munis d’un câble de 0,9 m.
Divers accessoires et pièces de rechange permettent l'extension des fonctionnalité des
servomoteurs (voir fiche 4699) :
Accessoires
• Set de conversion linéaire / rotatif, avec articulation type Cardan ASK72.1
• Set de conversion linéaire / rotatif, avec support ASK72.2
• Capot de protection pour montage en extérieur ASK75.2
Les servomoteurs peuvent être raccordés à tout appareil de réglage et d’automatisme
délivrant un signal progressif 0...10 V− et satisfaisant aux prescriptions de sécurité.
Variante
Signal de commande
réglable
Contacts auxiliaires
réglables, A et B
Vue d'ensemble
Commande
Câble de raccordement
Accessoires,
pièces de rechange
Combinaisons
d’appareils

Siemens Building Technologies CM2N4666F / 02.2001
Landis & Staefa Division 3/10
Moteur à courant continu offrant un réglage précis de la vitesse et un contrôle de la
course fiable pour protéger l’appareil et les volets.
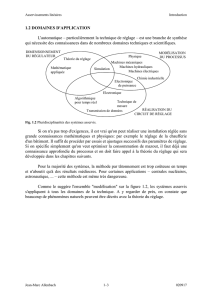
L’appareil est commandé par le signal de commande 0...10 V– d’un régulateur. Le mou-
vement linéaire est proportionnel au signal de commande.
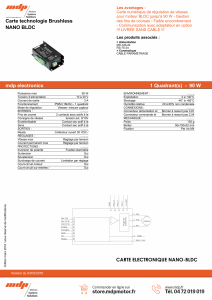
Le potentiomètre «Uo» permet de définir un point de départ entre 0...5 V– et le poten-
tiomètre «∆U» de régler la plage de fonctionnement entre 2...30 V–.
100
0
UO
Ys [%]
4637D04
2 5 10 35
2)
1)
∆U (max. 30 V)
4)
∆Uw 30 Y [V]
3)
Ys plage de réglage (100 % =course de 70 mm)
Y signal de commande
Uo plage du point de départ
∆U plage de fonctionnement (pour Ys = 100 %)
∆Uw plage de fonctionnement active pour Ymax = 10 V−
Uo
2
4
01
3
5
∆
U
30
2
15
10
5
20
25
Uo
4637Z01
∆
U
Exemples conformément au diagramme
Signal de
commande Plage Réglages
YYsUo
∆
U
1) 0…2 V−0…100 % 0 V−2 V−
2) 5…10 V−
5…35 V−0…17 %
0…100 % 5 V−30 V−
3) 0…10 V−
0…30 V−0…33 %
0…100 % 0 V−30 V−
4) * 0…10 V−0…100 % 0 V−10 V−
* Caractéristique pour réglage d'usine ou version standard
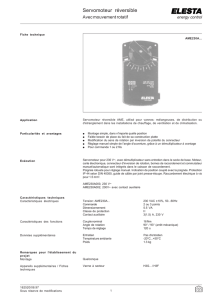
Recherche de la plage de réglage ∆U telle que le servomoteur provoque une ouverture
de 0...50 % pour un signal de commande Y = 2…10 V−.
Le point de départ Uo est de 2 V.
Calcul de la valeur de réglage pour ∆U :
plage de réglage max. Ysmax [%] 100 %
∆U = • (10 [V] − Uo [V]) = • (10 V − 2 V) = 16 V
plage de réglage Ys [%] 50 %
Uo = 2 V ; ∆U = 16 V
100
0
∆U (16 V)
Y [V]
YS [%]
4637D02
21810
Umin Umax
50
UoUmin = signal de commande min. (point de départ)
Umax = signal de commande max. (position finale)
Technique
Réglage de la
caractéristique
(selon modèle)
Exemple
Formule
Réglage des
potentiomètres

CM2N4666F / 02.2001 Siemens Building Technologies
4/10 Landis & Staefa Division
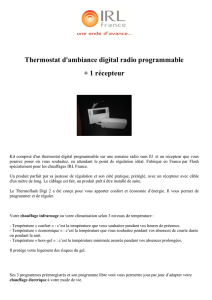
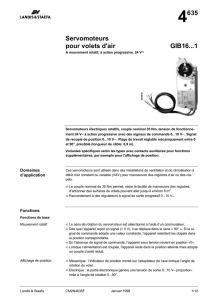
La figure suivante indique la relation entre les points d’enclenchement des contacts A et
B et la longueur de la course.
Positionnement de la
tige (réglage usine)
Tige (sortie)
0... max. 75 mm
Pas de réglage : 4 mm
Hystérésis de com-
mutation : 1 mm
Plage de réglage des
contacts A et B
B
-2 0 8 16 24 56 64 72
0 8 16 24 56 64
4666D01
72
mm
mm
+2
A
16
24
32
B
8
Aux Switch
Adjustment
mm
56
48
40
64
56
40
A
16
4666Z02
48
Les axes de réglage des contacts tournent avec le servomoteur. Les échelles indiquées
s’appliquent uniquement au sens de fonctionnement «sortie» du servomoteur.
Boîtier robuste entièrement métallique en fonte d’aluminium. Il garantit une durée de vie
élevée de l’appareil même sous les conditions les plus exigeantes.
Train d’engrenages sans entretien et silencieux, protégé contre les surcharges et les
blocages même en fonctionnement prolongé.
La tige est positionnée en usine à + 2 mm, afin d’assurer une pression satisfaisante sur
les volets.
La touche «PUSH» permet de débrayer l’appareil pour effectuer un réglage manuel de
la tige.
La limitation mécanique de la course de la tige peut être réalisée si l'on utilise un kit de
conversion linéaire / rotatif (cf. «Accessoires»).
Un commutateur situé en façade permet de sélectionner le sens de déplacement de la
tige.
Les appareils sont livrés avec un câble de raccordement monté de 0,9 m.
Les contacts auxiliaires A et B peuvent être réglés en façade de l’appareil.
Les potentiomètres permettant de régler les caractéristiques Uo et ∆U sont accessibles
sur la façade de l’appareil.
Contacts auxiliaires
réglables (selon modèle)
Remarque
Réalisation
Equipement de base
Boîtier
Train d’engrenages
Positionnement
de la tige
Réglage manuel
Limitation mécanique
de la course
Réglage du sens
de déplacement
Raccordement électrique
Eléments spécifiques
aux variantes
Contacts auxiliaires
Potentiomètres de réglage
de caractéristique

Siemens Building Technologies CM2N4666F / 02.2001
Landis & Staefa Division 5/10
Voir également les rubriques «Technique» et «Indications pour la mise en service» de
la présente notice.
4666Z01
A
B
Uo
2
4
01
3
5
∆
U
30
2
15
10
5
20
25
10
6
4
3
7
5
9
PUSH
8
11
1
2
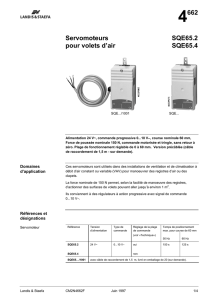
1 Tige : ↑ sortie
↓ entrée
2 Boîtier
3 Potentiomètre de réglage de la
Plage de fonctionnement
4 Potentiomètre de réglage de la
plage de positionnement initial
5 Commutateur de sélection du sens
de déplacement :
entrée/sortie
6 Patte de fixation
7 Câble d’alimentation
8 Câble de raccordement des
Contacts auxiliaires
9 Touche de débrayage
10,11 Axe de réglage des contacts A et B
Les principes de base relatifs aux systèmes utilisés comportent des renseignements
importants pour l’ingénierie. Il est conseillé de prendre connaissance au préalable des
prescriptions de sécurité qui y sont mentionnées. Toutes ces informations doivent être
observées en tenant compte d’un signal de commande 0...10 V–.
Les servomoteurs ne doivent être utilisés dans le système que pour les applications tel-
les que précisées dans la documentation relative aux principes de base de ce système.
Il faut par ailleurs tenir compte des particularités et prescriptions spécifiques à chaque
servomoteur, telles qu’elles figurent dans les chapitres «Domaines d'application», «Indi-
cations pour l’ingénierie» et «Caractéristiques techniques».
Les paragraphes précédés du symbole ci-contre comportent des prescriptions ou des
restrictions relatives à la sécurité des personnes et des biens. Il est donc impératif de
les prendre en compte.
Eléments de réglage
et de commande
Indications pour
l'ingénierie
STOP
Conformité de
l’utilisation
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%