Un signal analogique : petits rappels

[Arduino4]Lesgrandeursanalogiques
Danscettepartie,jevaisintroduirelanotiondegrandeuranalogiquequisontopposées
augrandeurslogiques.Grâceàcechapitre,vousserezensuitecapabled’utiliserdes
capteurspourinteragiravecl’environnementautourdevotrecarteArduino,oubiendes
actionneurstelsquelesmoteurs.
[Arduino401]Lesentréesanalogiquesdel’Arduino
Cepremierchapitrevavousfairedécouvrircommentgérerdestensionsanalogiques
avecvotrecarteArduino.Vousallezd’abordprendreenmainlefonctionnementd’un
certaincomposantessentielàlamiseenformed’unsignalanalogique,puisjevous
expliquerai comment vous en servir avec votre Arduino. Rassurezvous, il n’y a pas
besoindematérielsupplémentairepourcechapitre!
Unsignalanalogique:petitsrappels
Faisons un petit rappel sur ce que sont les signaux analogiques. D’abord, jusqu’à
présentnousn’avonsfaitqu’utiliserdesgrandeursnumériquesbinaires.Autrementdit,
nous n’avons utilisé que des états logiques HAUT et BAS. Ces deux niveaux
correspondent respectivement aux tensions de 5V et 0V. Cependant, une valeur
analogique ne se contentera pas d’être exprimée par 0 ou 1. Elle peut prendre une
infinitédevaleursdansunintervalledonné.Dansnotrecas,parexemple,lagrandeur
analogique pourra varier aisément de 0 à 5V en passant par 1.45V, 2V, 4.99V, etc.
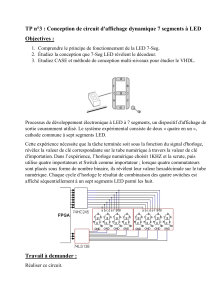
Voiciunexempledesignalanalogique,letrèsconnusignalsinusoïdal:
Onretiendraquel’onnes’occupequedelatensionetnonducourant,enfonction
dutemps.
Sionessayedemettrecesignal(cequejevousdéconseilledefaire)suruneentrée
numériquedel’Arduinoetqu’onlitlesvaleursavecdigitalRead(),onneliraque0ou1.
Les brochesnumériques de l’Arduino étantincapable de lireles valeursd’un signal
analogique.

Signalpériodique
Dans la catégorie des signaux analogiques et même numériques (dans le cas
d’horlogedesignalpourlecadencementdesmicrocontrôleursparexemple)onales
signauxditspériodiques.Lapérioded’unsignalestenfaitunmotifdecesignalqui
serépèteetquidonneainsilaformedusignal.Prenonsl’exempled’unsignalbinaire
quiprendunniveaulogique1puisun0,puisun1,puisun0,…
Lapériodedecesignalestlemotifquiserépètetantquelesignalexiste.Ici,c’estle
niveaulogique1et0quiformelemotif.Maiscelaauraitpuêtre11et0,oubien011,
voir000111,lespossibilitéssontinfinies!Pourunsignalanalogique,ilenvade
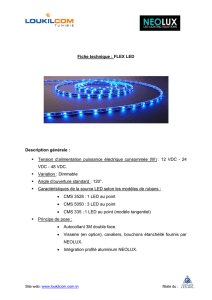
même.Reprenonslesignaldetoutàl’heure:
Icilemotifquiserépèteest“labossedechameau”ouplusscientifiquementparlant:
unepérioded’unsignalsinusoïdal. Pourterminer,lapériodedésigneaussiletemps
quemetunmotifàserépéter.Sij’aiunepériodede1ms,celaveutdirequelemotifmet
1mspoursedessinercomplètementavantdecommencerlesuivant.Etensachantle
nombredefoisqueserépètelemotifen1seconde,onpeutcalculerlafréquencedu
signalselonlaformulesuivante: ;avecFlafréquence,enHertz,dusignaletT
lapériode,enseconde,dusignal.
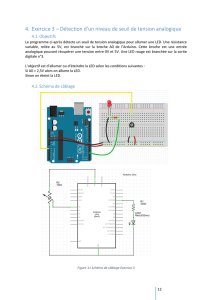
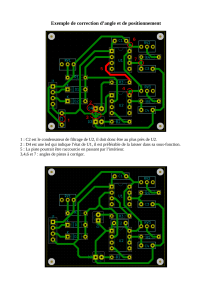
Notreobjectif
L’objectif va donc être double. Tout d’abord, nous allons devoir être capables de
convertir cette valeur analogique en une valeur numérique, que l’on pourra ensuite
manipuleràl’intérieurde notreprogramme.Parexemple,lorsquel’on mesurera une
tensionde2,5Vnousauronsdansnotreprogrammeunevariablenommée“tension”qui
prendralavaleur250lorsquel’onferalaconversion(cen’estqu’unexemple).Ensuite,
nousverronsavecArduinocequel’onpeutfaireaveclessignauxanalogiques.Jene
vousendispasplus…
F=
1
T

Lesconvertisseursanalogiques–>
numériqueouCAN
Qu’estcequec’est?
C’est un dispositif qui va convertir des grandeurs analogiques en grandeurs
numériques.Lavaleurnumériqueobtenueseraproportionnelleàlavaleuranalogique
fournie en entrée, bien évidemment. Il existe différentes façons de convertir une
grandeuranalogique,plusoumoinsfacilesàmettreenœuvre,plusoumoinsprécises
et plus ou moins onéreuses. Pour simplifier, je ne parlerai que des tensions
analogiquesdanscechapitre.
Ladiversité
Jevaisvousciterquelquestypesdeconvertisseurs,sachezcependantquenousn’en
étudieronsqu’unseultype.
Convertisseuràsimplerampe:ceconvertisseur“fabrique”unetensionquivarie
proportionnellementenuncourslapsdetempsentredeuxvaleursextrêmes.En
mêmetempsqu’ilproduitcettetension,ilcompte.Lorsquelatensiond’entréedu
convertisseur devient égale à la tension générée par ce dernier, alors le
convertisseurarrêtedecompter.Etpourterminer,aveclavaleurducompteur,il
détermine la valeur de la grandeur d’entrée. Malgré sa bonne précision, sa
conversionresteassezlenteetdépenddelagrandeuràmesurer.Ilest,decefait,
peuutilisé.
Convertisseur flash : ce type de convertisseur génère lui aussi des tensions
analogiques.Pourêtreprécis,ilengénèreplusieurs,chacuneayantunevaleur
plus grande que la précédente (par exemple 2V, 2.1V, 2.2V, 2.3V, etc.) et
comparela grandeurd’entréeàchacunde ces paliersde tension. Ainsi,il sait
entrequelleetquellevaleursetrouvelatensionmesurée.Cen’estpastrèsprécis
commemesure,maisilal’avantaged’êtrerapideetmalheureusementcher.
Convertisseur à approximations successives : Pour terminer, c’est ce
convertisseurquenousallonsétudier…
Arduinodisposed’unCAN
VousvousdoutezbienquesijevousparledesCAN,c’estqu’ilyauneraison.Votre
carteArduinodisposed’unteldispositifintégrédanssoncœur:lemicrocontrôleur.Ce
convertisseurestunconvertisseur“àapproximationssuccessives”.Jevaisdétaillerun
peupluslefonctionnementdececonvertisseurparrapportauxautresdontjen’aifait
qu’unbrefaperçudeleurfonctionnement(bienquesuffisant).
Ceci rentre dans le cadre de votre culture générale électronique, ce n’est pas
nécessaire de lire comment fonctionne ce type de convertisseur. Mais je vous
recommandevivementdelefaire,carilesttoujoursplusagréabledecomprendre
commentfonctionnentlesoutilsqu’onutilise!
Principededichotomie

Ladichotomie,çavousparle?Peutêtrequelenomnevousditrien,maisilestsûrque
vousenconnaissezlefonctionnement.Peutêtrealorsconnaissezvouslejeu“plusou
moins”enprogrammation?Siouialorsvousallezpouvoircomprendrecequejevais
expliquer,sinon lisez le principe surle lien que je viens de vous donner,cela vous
aideraunpeu.Ladichotomieestdoncuneméthodederechercheconditionnellequi
s’applique lorsque l’on recherche une valeur comprise entre un minimum et un
maximum. L’exemple du jeu “plus ou moins” est parfait pour vous expliquer le
fonctionnement. Prenons deux joueurs. Le joueur 1 choisit un nombre compris entre
deuxvaleursextrêmes,parexemple0et100.Lejoueur2neconnaitpascenombreet
doitletrouver.Laméthodelaplusrapidepourquelejoueur2puissetrouverquelestle
nombrechoisiparlejoueur1est:
Je le disais,le joueur2, pourarriverle plus rapidement au résultat, doit choisirune
méthode rapide. Cette méthode, vous l’aurez deviné, consiste à couper en deux
l’espacederecherche.Audébut,cetespaceallaitde0à100,puisaudeuxièmeessai
de40à100,autroisièmeessaide40à80,etc.
Cetexemplen’estqu’àtitreindicatifpourbiencomprendreleconcept.
Enconclusion,cetteméthodeestvraimentsimple,efficaceetrapide!Peutêtrel’aurez
vous observé, on est pas obligé de couper l’espace de recherche en deux parties
égales.
LeCANàapproximationssuccessives
Onyvient,jevaispouvoirvousexpliquercommentilfonctionne.Voyezvouslerapport
aveclejeuprécédent?Pasencore?Alorsjem’explique.Prenonsduconcretavecune
valeur de tension de 3.36V que l’on met à l’entrée d’un CAN à approximations
successives(j’abrégeraiparCANdorénavant).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Joueur1dit:"quelestlenombremystère?"
>;40
Joueur1dit:"Cenombreestplusgrand"
>;80
Joueur1dit:"Cenombreestpluspetit"
>;60
Joueur1dit:"Cenombreestplusgrand"
>;70
Joueur1dit:"Cenombreestplusgrand"
>;75
Joueur1dit:"Cenombreestpluspetit"
>;72
Bravo,Joueur2atrouvélenombremystère!

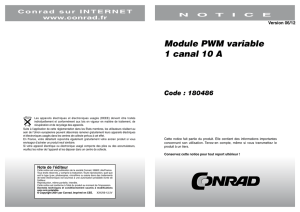
NotezlesymboleduCANquisetrouvejusteaudessusdel’image.Ils’agitd’un
“U”renverséetducaractère#.
Cettetensionanalogiquede3.36VvarentrerdansleCANetvaressortirsousforme
numérique(avecdes0et1).Maisquesepassetilàl’intérieurpourarriveràuntel
résultat ? Pour que vous puissiez comprendre correctement comment fonctionne ce
typedeCAN,jevaisêtreobligédevousapprendreplusieurschosesavant.
Lecomparateur
Commençonsparlecomparateur.Commesonnomlelaissedeviner,c’estquelque
chosequicompare.Cequelquechoseestuncomposantélectronique.Jenerentrerai
absolumentpasdansledétail,jevaissimplementvousmontrercommentilfonctionne.
Comparer,oui,maisquoi?
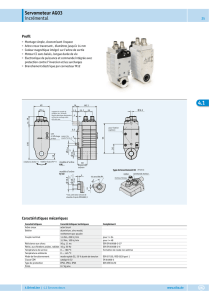
Destensions! Regardezsonsymbole,jevousexpliqueensuite…
Vousobservezqu’ildisposededeuxentrées et etd’unesortie .Leprincipe
estsimple:
Lorsque la tension alors ( étant la tension
d’alimentationpositiveducomparateur)
Lorsque la tension alors ( étant la tension
d’alimentationnégative,oulamasse,ducomparateur)
estuneconditionquasimentimpossible,sitelestlecas(sionrelie
et )lecomparateurdonneraunrésultatfaux
Parlonsunpeudelatensiond’alimentationducomparateur.Lemeilleurdescasestde
E
1
E
2
S
>
E
1
E
2
S= +
V
cc
+
V
cc
<
E
1
E
2
S= −
V
cc
−
V
cc
=
E
1
E
2
E
1
E
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
1
/
55
100%