Document

Exercices de DYNAMIQUE de rotation
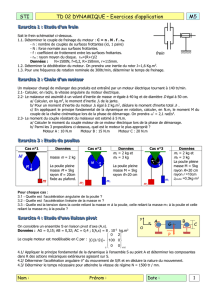
•Exercice 1 : étude d’un frein
•Exercice 2 : choix d’un moteur
•Exercice 3 : étude de poulies
•Exercice 4 : solide en liaison pivot

C = n . N . f . rmfrein
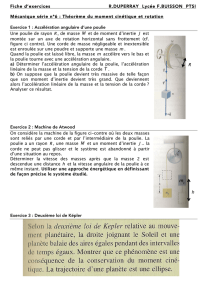
Exercice 1 : Etude d’un frein
Soit le frein schématisé ci-dessous.
1.1. Déterminer le couple de freinage du moteur :
- n : nombre de couples de surfaces frottantes (ici, 1 paire)
- N : force normale aux surfaces frottantes.
- f : coefficient de frottement entre les surfaces frottantes.
- rm: rayon moyen du disque. rm≈(R+r)/2
Données : N=1500N, f=0,2, R=150mm, r=115mm.
C = 1500 x 0,2 x (150+115)/2 = 39750 mmN
C = 39,75 mN

1.2. Déterminer la décélération du moteur.
On prendra une inertie du rotor J=1,6 Kg.m2.
1.3. Pour une fréquence de rotation nominale de 300tr/min,
déterminer le temps de freinage.
PFD : Cm –Cr = J . w’
0 –39,75 = 1,6 . w’
w’ = – 39,75 / 1,6 = - 24,84 rd/s2
t = (w–w0) / w’ = - 31,4 / - 24,84 = 1,26 s
w0= 2pN / 60 = 2px 300 / 60 = 31,4 rd/s

Exercice 2 : Choix d’un moteur
Un malaxeur chargé de mélanger des produits est entraîné par un moteur
électrique. La vitesse de rotation de ce moteur est égale à 140 tr/min.
2.1- Calculer, en rad/s, la vitesse angulaire du moteur électrique.
J1
= ½ .m . R2= ½ x 40 x 0,252= 1,25 kg.m2
w= 2pN / 60 = 2px 140 / 60 = 14,66 rd/s
2.2- Le malaxeur est assimilé à un volant d'inertie en forme de jante
de masse
m
égale à 40 kg et de diamètre
D
égal à 50 cm.
a/ Calculer, en kg.m2,le moment d'inertie
J1
de la jante.

JT= J1+ J2 = 1,25 + 2 = 3,25 kg.m2
b/ Pour un moment d'inertie du moteur
J
2égal à 2 kg.m2,
déduire le moment d'inertie total
J
Tcorrespondant à la chaîne
cinématique « jante + moteur ».
c/ En appliquant le principe fondamental de la dynamique en
rotation, calculer, en N.m, le moment M du couple de la chaîne
cinématique lors de la phase de démarrage.
On prendra w’= 2,1 rad/s2.
PFD : M = Cm –Cr = JTx w’
M = 3,25 x 2,1 = 6,825 N.m
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%