Diagramme objets

Diagramme
objets-interactions
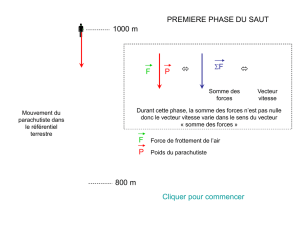
Le parachutiste




Repère de temps
t (s)
0
t1
t1: date NEGATIVE
t2
Δt
Δt : durée = t2–t1POSITIVE
 6
7
8
9
6
7
8
9
1
/
9
100%