MBSOFT : a Symbolic - Université catholique de Louvain

ELEC2753 - 2012 - Université catholique de Louvain
Machine asynchrone (seconde partie)
ELEC 2753 Electrotechnique

ELEC2753 - 2012 - Université catholique de Louvain
2
Rappels
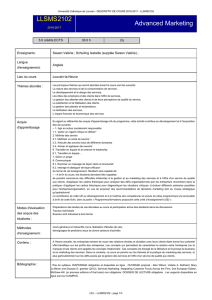
Rotor en court-circuit.
Définitions du glissement g:
Circuits équivalents monophasé vu du stator
p/
p/
s
ms
g
s
r
s
r
f
f
g
Ne pas confondre Rpm et R ’r(1-g)/g!!!!!!!!

ELEC2753 - 2012 - Université catholique de Louvain
3
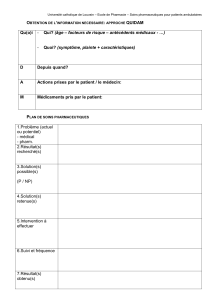
Bilan de puissance
Pour rappel, le couple électromagnétique Cem est égal à la puissance transmise
du stator au rotor divisée par la vitesse de rotation DU CHAMP s/ p .

ELEC2753 - 2012 - Université catholique de Louvain
4
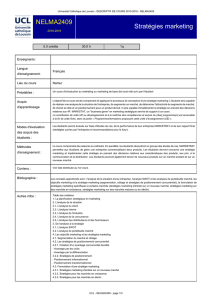
Bilan statorique
Pertes Joule stator : 3 RsIs2
Pertes magnétiques au stator : 3 E2/ Rp= EL2/Rp
Puissance transmise du stator au rotor : 3 U Iscos j- 3 RsIs2- 3 E2/ Rp
ou
pssss REIRIU /3cos3 22
j

ELEC2753 - 2012 - Université catholique de Louvain
5
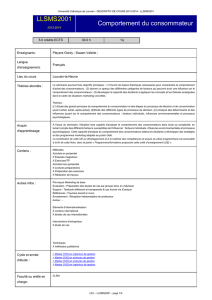
Bilan rotorique
Puissance transmise du stator au rotor :
ou 3 (R’r/ g) I’r2
Pertes ohmiques au rotor : 3 R’rI’r2
Pertes magnétiques au rotor : normalement négligeables (voir plus loin)
Puissance convertie en puissance mécanique :
Donc le rendement est toujours inférieur à 1-g
2
rr 'I
1
'R3 g
g
p
22
sss R/EIR3cosIV3 j
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%