Océanographie Physique VERSION PRELIMINAIRE

UNIVERSIT´
E DE LI`
EGE
Facult´
e des Sciences
Oc´
eanographie Physique
VERSION PRELIMINAIRE
Franc¸ois Ronday et Jean-Marie Beckers
Ann´
ee acad´
emique 2004-2005

Chapitre 1
Description locale des oc´
eans
18
9

10
CHAPITRE 1. DESCRIPTION LOCALE DES OC´
EANS
21
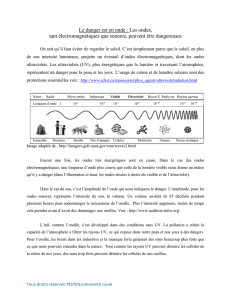
Figure 1.1 : Bassins oc´
eaniques.
1.1 Syst`
eme ´
etudi´
e, localisation
1.1.1 G´
eographie
L’oc´
ean couvre une grande partie de notre plan`
ete surtout dans l’h´
emisph`
ere Sud (figure
1.1). L’oc´
ean dont la profondeur moyenne est de l’ordre de 3800 m (figure 1.3) est entour´
e
par des plateaux continentaux (figure 1.2) qui, `
a certains endroits, peuvent ˆ
etre tr`
es vastes et
former de v´
eritables mers dites continentales comme la mer du Nord. Par convention, la limite
du plateau continental est situ´
ee pr`
es de la cassure `
a une profondeur de 200 m.
Les plateaux continentaux ne couvrent que 8% des espaces oc´
eaniques (figure 1.4) alors que
les mers elles-mˆ
emes couvrent 71% de la surface de la plan`
ete.
Notons que lors de l’´
etude du syst`
eme marin, on distingue souvent les mers ferm´
ees (typ-
iquement la M´
editerran´
ee ou la Mer Noire) qui n’ont qu’un ´
echange restreint avec le reste de
l’oc´
ean, les mers semi-ferm´
ees (Golfe du Mexique) ou un mˆ
eme courant p´
en`
etre et ressort, les
mers tropicales des mers arctiques etc ...sachant que cette caract´
erisation permet souvent de
cerner le fonctionnement de la mer en comparaison avec d’autres mers du mˆ
eme type.
1.1.2 Discipline
Nous nous int´
eresserons `
a la dynamique des masses d’eau qui r´
esulte de l’action du vent,
des mar´
ees (lunaires et solaires), des anomalies de la masse volumique de l’eau et de la pente
de la surface. Dans la suite, seront d´
ecrites les caract´
eristiques physiques de l’eau de mer et les
propri´
et´
es de la glace marine et ses m´
ecanismes de formation.
On peut noter que l’oc´
eanographie physique est encore une relativement jeune branche de
la science. En effet, en dehors de la th´
eorie math´
ematique des mar´
ees de Laplace en 1775,

1.1. SYST`
EME ´
ETUDI´
E, LOCALISATION
11
21
Figure 1.2 : Formes des bassins oc´
eaniques.
21
Figure 1.3 : Distribution de la topographie sur la terre.

12
CHAPITRE 1. DESCRIPTION LOCALE DES OC´
EANS
19
Figure 1.4 : Topographie des fonds marins.
l’oc´
eanographie physique ´
etait essentiellement descriptive et bas´
ee sur des observations faites
lors des grandes exp´
editions du 15-16 i`
eme si`
ecle et l’ouverture des routes marchandes. Ces ob-
servations concernaient ´
evidemment surtout les courants de surface et c’est seulement en 1751
que Henri Ellis a effectu´
e des sondages dans les tropiques indiquant l’existence d’eaux froides
en profondeur sans toutefois pouvoir expliquer leur origine (le m´
ecanisme de refroidissement
et de descentes aux pˆ
oles suivi de r´
echauffements et remont´
ees `
a l’´
equateur fut propos´
e en
1800 par Rumford). Une ´
etude syst´
ematique comme dans d’autres domaines de la science
s’av´
erait n´
ecessaire et l’exp´
edition du Discovery (1872-1876) fut probablement l’initiateur de
cette approche en oc´
eanographie. Les r´
esultats de cette exp´
edition ont ´
et´
e combin´
es avec
les th´
eories hydrodynamiques du 19i`
eme si`
ecle pour donner lieu `
a une premi`
ere ´
etude dy-
namique des oc´
eans. Ces th´
eories ont ensuite ´
et´
e adapt´
ees et particularis´
ees pour les processus
oc´
eaniques avant que l’av`
enement d’ordinateurs permette dans les ann´
ees 60 d’´
elaborer des
mod`
eles num´
eriques de circulation.
1.2 Propri´
et´
es physiques locales de l’eau de mer
Dans cette section, nous allons ´
enum´
erer les propri´
et´
es physiques mesurables qui permettent
de caract´
eriser les eaux de mer sans faire appel `
a des processus dynamiques mais seulement `
a
des quantit´
es observables.
1.2.1 Pression
Une mesure simple effectu´
ee en mer est la mesure de la pression (manom`
etres). Afin d’avoir
une estimation des ordres de grandeur des pressions observ´
ees en mer, consid´
erons (figure 1.5)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
1
/
192
100%