PHYSIQUE_files/Chapitre 1

!
"!
Chapitre)1.)La)Cinématique!
!
#$!%&'()$*&+,-!(*,.&-!/-!)0,1-)-'*!.-2!%0342!2$'2!2-!20,%&-3!.-2!%$,2-2!+,&!/50'*!430.,&*!6%5-2*!7!
.&3-!.-2!803%-2!3-240'2$9/-2!.-!/$!)&2-!-'!)0,1-)-'*:;!
!
1.1.)Référentiel)d’étude)
)
#-!)0,1-)-'*!.5,'!%0342!.(4-'.!.50<!=!0'!/-!3->$3.-!?;!@$3!-A-)4/-B!/-!)0,1-)-'*!.-!C$32!-2*!,'-!
-//&42-!/032+,50'!/-!3->$3.-!.5,'!40&'*!2&*,(!43D2!.,!E0/-&/!-*!,'-!%0,39-!*3D2!%0)4/&+,(-!/032+,50'!/-!
3->$3.-!.-!/$!F-33-!
!
!
#$!*3$G-%*0&3-!.-!C$32!1,-!.-4,&2!,'!40&'*!
43D2!.,!E0/-&/!
!
#$!*3$G-%*0&3-!.-!C$32!1,-!.-4,&2!/$!F-33-!!
6/-!)0,1-)-'*!.-!3(*30>3$.$*&0'!.-!C$32:!
!
!
H'!%0'%/,2&0'B!/-!)0,1-)-'*!.5,'!%0342!.0&*!I*3-!*0,G0,32!.(%3&*!4$3!3$4403*!7!,'!3(8(3-'*&-/!!
!
• !Un)référentiel!-2*!,'!09G-*!4$3!3$4403*!$,+,-/!0'!(*,.&-!/-!)0,1-)-'*!.5,'!%0342;!J/!-2*!),'&!
.5,'!3-4D3-!.5-24$%-!.5,'-!(%K-//-!.-!*-)42!6K03/0>-:!$8&'!.5-A43&)-3!/$!402&*&0'!.,!%0342!7!
%K$+,-!&'2*$'*;!
!
!
)
)
L-**-!$''(-!0'!1$!,*&/&2-3!-'!)(%$'&+,-!2-,/-)-'*!.-,A!*M4-2!.-!3-4D3-!N!/-!3-4D3-!%$3*(2&-'!-*!/-!
3-4D3-!.-!O3-'-*;!
!
)
)

!
P!
!
• Le)repère)cartésien):!
#-! 3-4D3-! %$3*(2&-'!(!,!,!,!)!$! 40,3! 03&>&'-! /-!
40&'*! Q! 8&A-! -*! 40,3! 1-%*-,32! ,'&*$&3-2!(!,!,!)!
%0'2*$'*2!
!
!
• Le)repère)de)Frenet):!
#-!3-4D3-!.-!O3-'-*!$!40,3!03&>&'-!/-!40&'*!C!60,!
,'!40&'*!.,!%0342:!-'!)0,1-)-'*;!E-2!1-%*-,32!
,'&*$&3-2!20'*!!!B!*$'>-'*!7!/$!*3$G-%*0&3-!-*!.$'2!
/-!2-'2!.,!)0,1-)-'*B!-*!!!B!4-34-'.&%,/$&3-!7!
!!!-*!03&-'*(!1-32!/5&'*(3&-,3!.-!/$!*3$G-%*0&3-!
!
!
!
!
• #5-'2-)9/-!!.-2!40&'*2!0%%,4(2!4$3!/-!2M2*D)-!)(%$'&+,-!4-'.$'*!20'!)0,1-)-'*!3-43(2-'*-!
2$!trajectoire;!!
!
R'-!(*0&/-!!8&/$'*-!.(%3&*!,'-!/&>'-!.30&*-;!#$!*3$G-%*0&3-!-2*!3-%*&/&>'-;!E&!/50'!03&-'*-!,'!$44$3-&/!4K0*0!
1-32!/5H*0&/-!@0/$&3-!-*!0'!4K0*0>3$4K&-!/-!%&-/!$1-%!,'!*-)42!.5-A402&*&0'!*3D2!/0'>B!0'!092-31-!+,-!/-2!
$,*3-2!(*0&/-2!.(%3&1-'*!.-2!*3$G-%*0&3-2!%&3%,/$&3-2;!R'!2S&-,3!+,&!8$&*!,'!2$,*!$,!20))-*!.5,'-!%0//&'-!
$!-'!3-1$'%K-!,'!)0,1-)-'*!+,&!-2*!4/,2!.&88&%&/-!7!.(%3&3-;!E0'!%-'*3-!.-!)$22-!.(%3&*!,'-!4$3$90/-B!
)$&2!/-2!40&'*-2!.-!2-2!2S&2!.(%3&1-'*!.-2!*3$G-%*0&3-2!*3D2!%0)4/&+,(-2B!%$3!/-!2S&-3!*0,3'-!$,*0,3!.-!
/,&T)I)-!4-'.$'*!/-!2$,*;!
!
!
!
!
F3$G-%*0&3-!3-%*&/&>'-!.5,'-!
(*0&/-!8&/$'*-!
F3$G-%*0&3-2!%&3%,/$&3-2!.-2!
(*0&/-2!4$3!3$4403*!7!/5H*0&/-!
@0/$&3-!
F3$G-%*0&3-!4$3$90/&+,-!.,!
%-'*3-!.-!)$22-!.5,'!2S&-,3!!
• @0,3!(*,.&-3!/-!)0,1-)-'*!.5,'!%0342!0'!%0'2&.D3-!+,5&/!-2*!(+,&1$/-'*!7!,'!2-,/!40&'*!2&*,(!
.$'2!20'!%-'*3-!.-!)$22-!-*!.-!)$22-!(>$/-!7!%-//-!.,!%0342;!
#-2!)0,1-)-'*2!.-!*0,2!/-2!$,*3-2!40&'*2!4-,1-'*!I*3-!.(.,&*2!7!4$3*&3!.,!)0,1-)-'*!.,!%-'*3-!.-!
)$22-B!)$&2!%-!*3$&*-)-'*!'-!8$&*!4$2!4$3*&-!.,!430>3$))-!.-!F-3)&'$/-;!H'!)(%$'&+,-!0'!1$!.0'%!
4$3/-3!.-2!points)matériels!-*!'0'!4$2!.-2!%0342;!
!
!
1.2.)Cinématique)du)point)matériel)
)
@0,3!.(%3&3-!/-!)0,1-)-'*!.5,'!40&'*!)$*(3&-/!0'!&'*30.,&*!4/,2&-,32!>3$'.-,32!1-%*03&-//-2!N!/-!
1-%*-,3!.-!402&*&0'B!/-!1-%*-,3!1&*-22-!-*!/-!1-%*-,3!$%%(/(3$*&0';!Q'!*3$1$&//-3$!.$'2!,'!3-4D3-!
%$3*(2&-'!!(!,!,!,!)!

!
U!
!
!
!
!
• Le)vecteur)de)position)
• .0''-!/$!402&*&0'!.,!40&'*!2,3!2$!*3$G-%*0&3-!7!%K$+,-!&'2*$'*!*!
!
!" !=!!!+!!!+!(!)!!
!
• #-2!%003.0''(-2!A6*:B!M6*:B!V6*:!20'*!.-2!80'%*&0'2!.-!*-)42!-*!20'*!$44-/(-2!(+,$*&0'2!
K03$&3-2!.,!)0,1-)-'*!
!
• Vecteur)vitesse)instantanée)
• -2*!(>$/!7!/$!.(3&1(-!4$3!3$4403*!$,!*-)42!.,!1-%*-,3!.-!402&*&0'!-*!3-43(2-'*-!/-!
1-%*-,3!1&*-22-!)0M-''-!%$/%,/(!40,3!.-2!&'*-31$//-2!.-!*-)42!.-!4/,2!-'!4/,2!4-*&*2!
+,&!*-'.-'*!1-32!V(30!
!(!)=
!!"
!" =lim
∆!→!
!" !+∆!−!"(!)
∆!!
!
!
• /-2! %0)402$'*-2! .,! 1-%*-,3! 1&*-22-! 20'*! /-2! .(3&1(-2! 4$3! 3$4403*! $,! *-)42! .-2!
%003.0''(-2!A6*:B!M6*:!-*!V6*:!.,!1-%*-,3!.-!402&*&0'!
!!=
!"(!)
!" !+!"(!)
!" !+
!"(!)
!" !=!!!!+!!!!+!!!!!
!
• /-!1-%*-,3!1&*-22-!-2*!*$'>-'*!7!/$!*3$G-%*0&3-B!03&-'*(!.$'2!/-!2-'2!.,!)0,1-)-'*!-*!$!
,'-!'03)-!+,&!25-A43&)-!-'!);2T"!
!
)

!
W!
• Vecteur)accélération)instantanée)
• L5-2*!/$!.(3&1(-!4$3!3$4403*!$,!*-)42!.,!1-%*-,3!1&*-22-!
!(!)=
!!
!" =lim
∆!→!
!!+∆!−!(!)
∆!!
!
• #-2!%0)402$'*-2!.,!1-%*-,3!$%%(/(3$*&0'!20'*!/-2!.(3&1(-2!4$3!3$4403*!$,!*-)42!.-2!
%0)402$'*-2!.,!1-%*-,3!1&*-22-!!
!!=
!!!(!)
!" !+
!!!(!)
!" !+
!!!(!)
!" !=!!!!+!!!!+!!!!!
!
• #-!1-%*-,3!$%%(/(3$*&0'!-2*!03&-'*(!1-32! /5&'*(3&-,3! .-! /$!*3$G-%*0&3-!-*!$!,'-! '03)-!
+,&!25-A43&)-!-'!);2TP!!
!
!
!
!
1.3.)Mouvements)simples)d’un)point)matériel)
!
R'!40&'*!)$*(3&-/!4-,*!$10&3!,'!)0,1-)-'*!*3D2!%0)4/-A-;!L-**-!$''(-!0'!1$!25&'*(3-22-3!2-,/-)-'*!7!
+,-/+,-2!)0,1-)-'*2!2&)4/-2!N!!
!
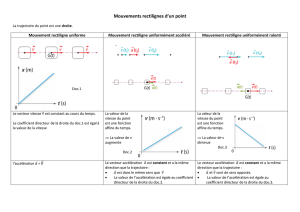
A.)Mouvements)rectilignes)
)
• #$!*3$G-%*0&3-!-2*!,'-!.30&*-!
!
• L$2!4$3*&%,/&-32N!
• Mouvement)rectiligne)uniforme):!
• #$!*3$G-%*0&3-!-2*!,'-!.30&*-B!
!
• /-!1-%*-,3!1&*-22-!-2*!,'!1-%*-,3!%0'2*$'*!6'-!1$3&-!4$2!-'!*-)42!2$!
.&3-%*&0'B!20'!2-'2!-*!2$!'03)-:!
!
• Mouvement)rectiligne)uniformément)varié):!
• #$!*3$G-%*0&3-!-2*!,'-!.30&*-!!
!
• #-!1-%*-,3!1&*-22-!%K$'>-!%0))-!'03)-B!)$&2!4$2!%0))-!.&3-%*&0'!-*!
%0))-!2-'2!!
!
• #-!1-%*-,3!$%%(/(3$*&0'!-2*!,'!1-%*-,3!%0'2*$'*!6%0))-!'03)-B!.&3-%*&0'!
-*!2-'2:!
!
R'-!10&*,3-!+,&!30,/-!2,3!,'-!30,*-!.30&*-!7!1&*-22-!%0'2*$'*-!$!,'!)0,1-)-'*!3-%*&/&>'-!-*!,'&803)-;!
E&!/-!%0'.,%*-,3!$44,&!$1-%!,'-!803%-!%0'2*$'*-!2,3!/$!4(.$/-!.-!/5$%%(/(3$*-,3B!/$!1&*-22-!.-!/$!10&*,3-!
1$!$,>)-'*-3!.-!/$!)I)-!+,$'*&*(!%K$+,-!2-%0'.-;!#-!)0,1-)-'*!2-3$!3-%*&/&>'-!-*!,'&803)()-'*!
1$3&(;!
!

!
X!
!
!
2.)Mouvements)circulaires))
!
• #$!*3$G-%*0&3-!-2*!,'!%-3%/-!
Q'!4-,*!.(%3&3-!,'!)0,1-)-'*!%&3%,/$&3-!-'!,*&/&2$'*!,'!3-4D3-!%$3*(2&-'B!)$&2!/-2!>3$'.-,32!*-/!+,-!
/-!1-%*-,3!.-!402&*&0'B!/-!1-%*-,3!1&*-22-!-*!/-!1-%*-,3!$%%(/(3$*&0'!$,3$&-'*!.-2!-A43-22&0'2!*3D2!
%0)4/&+,(-2;!Y$'2!%-!%$2!0'!43(8D3-!,*&/&2-3!,'!2M2*D)-!.5$A-2!)09&/-B!%5-2*T7T.&3-!+,&!2,&*!/-!40&'*!
)$*(3&-/!.$'2!20'!)0,1-)-'*!N!/-!3-4D3-!.-!O3-'-*!.(8&'&!%&T.-22,2;!
!
• #-!1-%*-,3!1&*-22-N!
• H2*!*$'>-'*!7!/$!*3$G-%*0&3-!
• !=!!!!
!
• #-!1-%*-,3!$%%(/(3$*&0'!N!
• -2*!03&-'*(!1-32!/5&'*(3&-,3!.,!%-3%/-!
• !=!!!!+!!!!=!"
!"
!!+!!
!
!!!
!
!
!
!
#$! %0)402$'*-! *$'>-'*&-//-! .-! /5$%%(/(3$*&0'! -2*! 3-240'2$9/-! .-! /$! 1$3&$*&0'! .-! /$! 1&*-22-! .,! 40&'*!
)$*(3&-/!2,3!2$!*3$G-%*0&3-!*$'.&2!+,-!/$!%0)402$'*-!'03)$/-!.-!/5$%%(/(3$*&0'!'-!)0.&8&-!4$2!/$!1$/-,3!
.-!/$!1&*-22-B!)$&2!%K$'>-!7!%K$+,-!&'2*$'*!2$!.&3-%*&0';!
!
!
!
 6
6
1
/
6
100%