PHYSIQUE 3 PARTIE B: Oscillations - BFH

E2 / Physique / Vibrations
1
Stefan Stankowski BFH / HES BE - TI Biel / Bienne
HES Bernoise
Technique et Informatique
Electricité et Systèmes de Communication
PHYSIQUE 3
PARTIE B: Oscillations

E2 / Physique / Vibrations
2
Stefan Stankowski BFH / HES BE - TI Biel / Bienne
OSCILLATIONS
I. Introduction
Il convient de distinguer les deux types de mouvement suivants:
• mouvements dirigés (d'un point de départ à un point final, p.ex. chute libre)
• mouvements périodiques, p.ex.
mouvement circulaire ou elliptique (comme celui de la terre autour du soleil) ou
mouvement oscillatoire (p.ex. d'un noyau atomique autour de sa position d'équilibre).
De même, les machines et instruments produisent:
des transitions d'un état 1 à un état 2 à la suite d'un changement des paramètres de réglage,
des mouvements cycliques (moteur, turbine), ou bien
des vibrations.
Les réactions transitoires et oscillatoires sont donc ce qu'on étudie typiquement en technique de réglage.
Les vibrations (oscillations) s'observent lorsqu'un corps est dévié de sa position d'équilibre et y retourne
par intermédiaire d’une "force de rappel". Le travail effectué par la force de rappel produit de l'énergie
cinétique de manière que le corps dépasse la position d'équilibre et que les mouvements de déviation et
de rappel se répètent périodiquement.
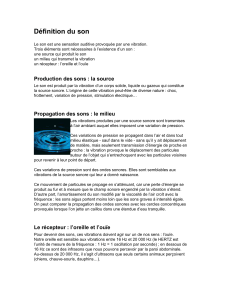
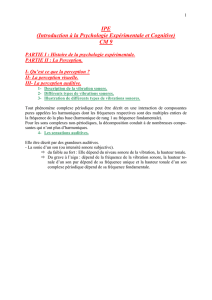
Selon les caractéristiques de la force de rappel,
l'aspect des vibrations peut être très varié,
d'un sinus régulier jusqu'aux dents de scie.
La représentation à côté donne la vibration
produite par une flûte, une clarinette, un hautbois
et un saxophone, respectivement, tous jouant le
même son.
Cette situation apparemment compliquée, est pour-
tant simplifiée en considérant le théorème de Fourier:
Toute fonction périodique peut se construire par super-
position de fonctions sinus et cosinus, ayant des fré-
quences différentes.
Cela justifie de nous concentrer ici sur les vibrations
les plus simples, dites "harmoniques" qui se décrivent
par des fonctions sinus ou cosinus simples.
En cas de besoin, on saura décrire les vibrations plus
compliquées en sommant différentes vibrations harmoniques.
Nous démontrerons au chapitre 3 que les vibrations harmoniques se produisent dans la nature au cas où
la force de rappel est une fonction linéaire de la déviation de l'équilibre. C'est le cas (au moins de manière
approximative) pour les systèmes élastiques.
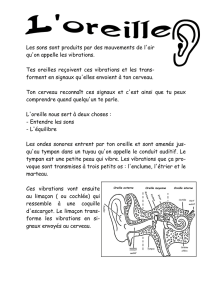
I.1 Relation entre mouvement circulaire et oscillation harmonique
Le mouvement circulaire et la vibration sont tous deux des phéno-
mènes périodiques.
En effet, la vibration harmonique peut être considérée comme
la projection du mouvement circulaire uniforme sur l'axe des x.
Soit ω (= const) la vitesse angulaire du mouvement circulaire.
L'angle du rayon vecteur par rapport à l'axe des x est
Φ = ω t + Φ
0

E2 / Physique / Vibrations
3
Stefan Stankowski BFH / HES BE - TI Biel / Bienne
x = r cos Φ = A cos ( Φ
Φ Φ
Φ
0
+ ω
+ ω + ω
+ ω t) est la projection sur l’axe des x.
A = r représente l'amplitude de la vibration
ω
ωω
ω = 2 π
ππ
π f , la pulsation, est directement liée avec la fréquence f (vibrations par seconde).
T = 1 / f = 2π
ππ
π / ω
ωω
ω est la période de la vibration.
Φ
Φ Φ
Φ
0
donne la phase de la vibration par rapport au zéro du temps.
Si la vibration commence au point de déviation maximale, A: Φ
0
= 0, x = A cos ω t
si elle commence à la position d'équilibre (choc): Φ
0
= -π / 2, x = A sin ω t
L'argument de la fonction cosinus est appelé la "phase" de l'oscillation.
I.2 Systèmes élastiques
Dans la nature, on trouve des vibrations harmoniques avec les systèmes dits élastiques dont la force de
rappel augmente proportionnellement à la déviation de l'équilibre, x ("loi de Hooke"):
F
rappel
= - c x [c] = Nm
-1
La constante c est souvent désignée comme D ou k.
Dans la plupart des cas, c est déterminée expérimentalement à partir de la déviation à l'équilibre:
c = F / x
équilibre
En principe, c peut aussi se calculer à partir des paramètres du matériau élastique (voir annexe 1).
Exemples importants:
• ressort
• poutre élastique
Remarquez. Pour les déviations très faibles de la position d'équilibre
pratiquement toute force de rappel pourra être linéarisée.
Donc: les petites déviations donnent lieu à des vibrations harmoniques
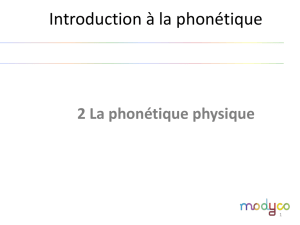
II. Oscillation harmonique non amortie
II.1 Equation d'oscillation
Le modèle le plus simple d'un système capable de vibration harmonique est donné par un ressort
élastique de masse négligeable et avec frottement négligeable, auquel est suspendu une masse m. La
constante du ressort pourra être déterminée à partir de l'élongation à l'équilibre:
c x
équilibre
= m g

E2 / Physique / Vibrations
4
Stefan Stankowski BFH / HES BE - TI Biel / Bienne
A l'équilibre, la masse m est soumise à une force nulle.
Il est donc possible de se limiter à considérer uniquement
les forces supplémentaires qui apparaissent lorsque la masse
dévie de l'équilibre d'une distance x:
Force résultante = - c (x
équilibre
+ x) + m g = - c x
Soit le ressort étendu jusqu'à l'élongation A et puis lâché.
Ne reste que la force de rappel du ressort, - c x ,
ce qui conduit à l'équation du mouvement suivante:
••
m a = m x = - c x ou bien:
••
m x + c x = 0 (*) (équation différentielle de l'oscillation harmonique)
Il est facile de démontrer que la fonction de la vibration harmonique représente une solution de cette
équation différentielle (ω étant un paramètre qui restera à déterminer):
x = A cos ω t
•
x = - A ω sin ω t
••
x = - A ω
2
cos ω t
••
inséré en (*): x + (c / m) x = A cos ωt (- ω
2
+ c / m) = 0
Cela satisfait à l'équation du mouvement pourvu que l'expression s'annulle, donc si:
ω
2
= c / m
La masse suspendue au ressort exécute donc des vibrations avec une fréquence angulaire
m
c
=
ω
Période
c
m
T
π
2=
Amplitudes: élongation x
max
= A
vitesse v
max
= A ω
accélération a
max
= A ω
2
Notez: La fréquence de la vibration ne dépend pas de l'amplitude!
| Si le mouvement du ressort ne commence pas à l'élongation maximale, mais (à la suite d'un
| choc) à la position d'équilibre, le cosinus de la solution sera remplacé par un sinus. Pour toute
| autre condition initiale, il faut introduire l'angle de phase Φ
0
correspondant .

E2 / Physique / Vibrations
5
Stefan Stankowski BFH / HES BE - TI Biel / Bienne
II.2 Energie
A élongation maximale, l'énergie cinétique est nulle et donc:
E
tot
= E
pot
= ½ c A
2
Au passage de la position d'équilibre, l'énergie potentielle est nulle, donc:
E
tot
= E
cin
= ½ m A
2
ω
2
A toute élongation, E
tot
doit être constante. Il s'en suit:
m v
max
2
= m A
2
ω
2
= c x
max
2
= c A
2
, donc encore: ω
2
= c / m.
•
Pour un x arbitraire: E
kin
= ½ m x
2
= ½ m A
2
ω
2
sin
2
(ωt + Φ
o
)
E
pot
= ½ c x
2
= ½ c A
2
cos
2
(ωt + Φ
o
)
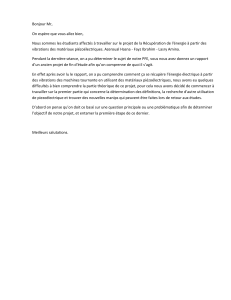
II.3 Combinaison de plusieurs éléments élastiques
Les systèmes complexes comportant plusieurs éléments élastiques peuvent être réduits à un système
équivalent à une seule constante élastique D, en respectant les règles suivants:
ressorts en parallèle: c = c
1
+ c
2
(forces additives, même déviation x)
1 1 1
ressorts en série: -- = -- + --
c c
1
c
2
(déviations additives, même force F)
II.4 Autres notations de l'oscillation harmonique
La solution de l'équation différentielle (*) peut s'écrire de différentes manières, toutes équivalentes
entr'elles:
x = A cos (ω t + Φ
0
) (ou bien sin ... avec un Φ
0
différent)
ou bien x = A cos ω t + B sin ω t (A = A cos Φ
0
, B = - A sin Φ
0
)
j(ω t + Φ
0
)
ou bien x = A e
j ω t - j ω t
ou bien x = A
1
e + A
2
e A
1
= ½ (A’ - j B’), A
2
= ½ (A’ + j B’)
Notez que dans la dernière de ces notations, A
1
, A
2
sont des nombres complexes.
Pour les représentations complexes, il est sous-entendu que seul la partie réelle est mesurable.
Par la suite nous utiliserons surtout la première de ces notations. Elle pourra toujours être remplacée par
une des autres, en ajustant les constantes.
Dans le cas des oscillations non-harmoniques on aura des sommes de fonctions exponentielles avec
différentes fréquences. C’est la base des approches Fourier et Laplace.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%