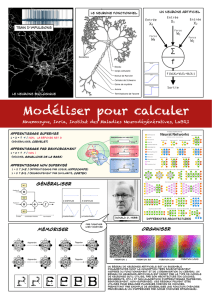
Apprentissage non-supervisé. Réseaux récurrents


Rappel : classification supervisée
x0=1
x1
w0
w1
y
x
classe ‘bleu’ classe ‘rouge’
2 classes
linéairement séparables
y=g(!
w⋅!
x)=1
1+e−w0−w1x1

Rappel : classification supervisée
y=g(!
w⋅!
x)=1
1+e−w0−w1x1−w2x2
x1
x2
w1
w2
w0
x0=1
2 classes
linéairement séparables

Rappel : classification supervisée
yk=g(!
wk⋅!
x)
“perceptron"
K classes linéairement
séparables
x1
x0=1
xD
y0
yK
...
...

Rappel : classification supervisé
perceptron multicouche
(multilayer perceptron)
Classes en plusieurs
dimensions avec des
surfaces de séparation
arbitraires
y0
yk
yK
... ...
xi
x0=1
xD
... ...
zj
zH
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
1
/
75
100%