Enregistreur asservi

1
Asservissement de position
avec correction tachymètrique
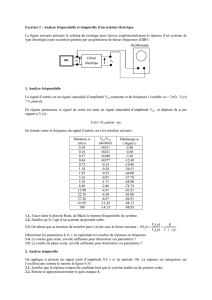
On étudie un système de positionnement linéaire constitué d'un moteur à courant continu
alimenté par un amplificateur.
On donne :
Pour l'amplificateur U = A vER,
Pour le moteur : moment d'inertie J, résistance r, couple de frottements visqueux
f
C
(où est la vitesse en rad/s) ; couple moteur
KiCm
(où i est le courant d'induit).
Pour le convertisseur rotation-translation :
ayS
( angle de rotation).
Pour le capteur de position :
RS
v W.y
.
1 Etude de la boucle de position seule.
1.1 Modélisation
1.1.1 Etablir l'équation différentielle qui régit les variations de la vitesse du moteur :
m m0
dt
τ t H U t
dt
.
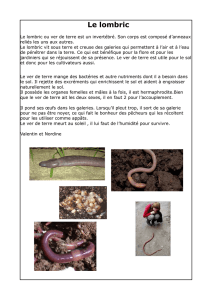
1.1.2 En déduire la transmittance du moteur, puis compléter le diagramme
fonctionnel représenté sur la figure 1.
1.1.3 Donner l'expression de la fonction de transfert en boucle ouverte :
R
E
Vp
Hp Vp
.
1.1.4 La mettre sous la forme :
12
1
Hp pω (1 p ω )
.
On exprimera
1
et
2
en fonction de
0m
H
, W, a, A,
m
.
On donne
s/rad10H0m
, a =1,33.10
2
m/rad, W =50V/m, K =2,51.10
2
Vs/rad,
r =4,7 ,
ms75
m
.
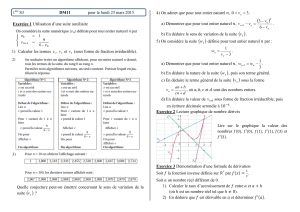
1.2 Etude de la stabilité du système.
Pour A = 1, on donne le diagramme de Bode ( gain et phase ) de H(j).
— Mesurer la marge de phase du système.
— En déduire la valeur de A qui permet d'avoir une marge de phase de 45°.
VE(p)
VR(p)
Vr
Ys(p)
p
Ω(p)
VER(p)
U(p)
figure 1

2
1.3 Etude de la précision du système
1.3.1 Etablir la tansmittance relative à l'erreur :
ER
E
Vp
Fp Vp
1.3.2 On donne le théorème de la valeur finale :
tjω0
limf t lim pF p
— En déduire l'erreur (statique) pour une attaque en échelon
EE
Vp p
.
— En déduire l'erreur (de traînage) pour une attaque en rampe
E2
α
Vp p
.
1.4 Etude de la rapidité du système
1.4.1 Calculer la transmittance en boucle fermée T(j), puis la mettre sous la forme
canonique :
02
2
00
T
T(jω) jω
jω
1 2m ωω
1.4.2 Exprimer m et
0
en fonction de A.
1.4.3 A partir de l'abaque donnée en annexe, déterminer la valeur de A qui assure un
temps de réponse à 5% minimum ?
1.4.4 Sachant que
0
%5r 2
44,0t
, calculer la valeur minimale de
%5r
t
.
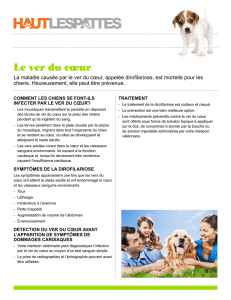
2 Correction par boucle tachymétrique.
On montre qu'une diminution de
m
améliore les performances du montage. Pour cela, on
réalise le montage correspondant au schéma bloc de la figure 2.
La dynamo tachymétrique fixée sur l'arbre du moteur donne une tension
g
e
proportionnelle
à la vitesse de rotation :
gg Ke
Un réducteur réduit cette tension à
1g
v Xe
.
Figure 2
VE(p)
VR(p)
Vr
Ys(p)
(p)
Ω(p)
VER(p)
U(p)
Réducteur
X
Dynamo tachy
Kg
V1(p)
A'
W

3
2.1 Compléter le schéma de la figure 2 par les fonctions de transfert adéquates.
2.2 En déduire la fonction de transfert
ER
p
Fp Vp
.
— Montrer que dans le cas où
'AHXK 0mg
>> 1, on peut la mettre sous la forme :
g
ER m
1 XK
p
Fp V p 1 τ ' p
— Exprimer
m
'
en fonction de X,
m0mg ,'A,H,K
.
2.3 Le schéma de la figure 2 peut se simplifier et être remplacé par celui de la figure 3.
Figure 3
Compléter la figure 3 et en déduire la fonction de transfert en boucle ouverte du système :
R
BO E
Vp
TpVp
.
2.4 On donne
s.rad/V23,0Kg
et X = 2 10-3, déterminer A' pour avoir une M = 45°.
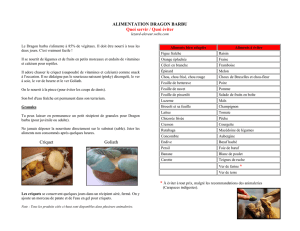
2.5 Mesurer le nouveau temps de réponse à 5 % sur le relevé de la figure 4. Commenter les
performances du système corrigé (rapidité, stabilité, précision).
Time (sec.)
Amplitude
Step Response
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
0
0.2
0.4
0.6
0.8
1
1.2
1.4 From: Input Point
To: Output Point1
figure 4 : réponse indicielle en BF avec la boucle de correction tachymétrique.
VE(p)
VR(p)
Vr
Ys(p)
(p)
Ω(p)
VER(p)
W

4
ANNEXE :
Annexe
Frequency (rad/sec)
Phase (deg); Magnitude (dB)
Bode Diagrams
10-1 100101102103104
-200
-180
-160
-140
-120
-100
-80
-60
-40
-20
0
To: Output Point
-200
-150
-100
-50
0
50
100 From: Input Point
Gain en dB
Argument en °
Pulsation en rad/s
1
/
4
100%