TP Physique 1ère S : Les Lois de Newton

Page 1
16/04/2017
Classe de 1ère S
TP de PHYSIQUE N° 4
LES LOIS DE NEWTON
Objectifs :
1- Faire le bilan des forces appliquées à un solide
2- Tracer des vecteurs vitesse ainsi que des variations de vecteurs vitesse
3- Faire un lien entre la variation du vecteur vitesse et la somme vectorielle des forces appliquées au solide (lois de Newton)
1. EXPERIENCE
Un mobile autoporteur est relié, à un point fixe O par un fil inextensible de masse négligeable. Après le lancement du mobile, on
enregistre à intervalle de temps réguliers = 20 ms, les positions successives du centre d'inertie G du mobile. Après avoir
décrit une partie de la trajectoire, au cours de laquelle le fil est tendu, ce dernier casse et, un peu plus tard, la turbine qui
éjecte l'air ne fonctionne plus. L'enregistrement obtenu est représenté sur le document suivant.
2. EXPLOITATION
On constate sur l'enregistrement qu'il y a 3 phases distinctes au cours du mouvement du mobile. Donnez sous la forme Gi Gj les
limites de chacune des phases. Donnez la nature des différents mouvements de G, en justifiant sans calcul (analyse de
l'enregistrement). Dans tout ce qui suit, le vecteur vitesse
V
est mis pour
)G(V
.
2.1. Etude de la première phase
1- Faites le bilan des forces extérieures appliquées au mobile. Les représenter.
2- Evaluez la somme vectorielle de ces forces. Représentez-la qualitativement sur l'enregistrement à l'instant t4.
3- A partir de l'enregistrement, tracez les vecteurs vitesse
3
V
et
5
V
Le vecteur vitesse de G est-il constant ou variable ?
Echelle : 1 cm pour 0,5 m.s-1 .
4- Construisez le vecteur
354 VVV
au point G4 Quelle est sa direction ? Quel est son sens?
5- Comparez cette direction et ce sens à la direction et au sens de la somme vectorielle des forces extérieures appliquées au
mobile.
2.2. Etude de la deuxième phase
1- Faites le bilan des forces extérieures appliquées au mobile. Les représenter.
2- Evaluez la somme vectorielle de ces forces.
3- Que pouvez-vous prévoir pour le vecteur
)G(V
?
2.3. Etude de la troisième phase
1- Faites le bilan des forces extérieures appliquées au mobile. Représentez-les.
6- Evaluez la somme vectorielle de ces forces. Représentez-la qualitativement sur l'enregistrement à un instant quelconque.
2- Trouvez la direction et le sens du vecteur
)G(V
.
3- Comparez
)G(V
à la somme vectorielle des forces.
3. TROISEME LOI DE NEWTON : PRINCIPE DES ACTIONS RECIPROQUES
Sur deux petits chariots, sont fixés des aimants de telle sorte qu’il y ait répulsion (pôles de même nom en regard).
Approchez les deux chariots puis lâchez le système.
Recommencez en accrochant l’un à l’autre les deux dynamomètres fixés sur les chariots.
De telles observations ont conduit Newton à énoncer le principe des actions réciproques. Faites de même !

Page 2
16/04/2017
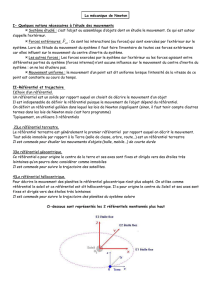
Enregistrement des positions du centre d'inertie du mobile autoporteur
+ G7
+ G6
+ G5
+ G4
+ G3
+ G2
+ G1
+ G0
+ G13
+ G12
+ G11
+ G10
+ G9
+ G8
O +
+ G16
+ G15
+ G14
Enregistrement à l'échelle ½

Page 3
16/04/2017
Travaux pratiques
LES LOIS DE NEWTON
MATERIEL ET PRODUITS
MATERIEL
PRODUITS
Table à coussin d'air et ses accessoires
Petits chariots munis de leurs aimants droits
2 dynamomètres 0,5 N

Page 4
16/04/2017
Travaux pratiques
LES LOIS DE NEWTON
FICHE PROFESSEUR
1. EXPERIENCE
Un mobile autoporteur est relié, à un point fixe O par un fil inextensible de masse négligeable. Après le lancement du mobile, on
enregistre à intervalle de temps réguliers = 20 ms, les positions successives du centre d'inertie G du mobile. Après avoir décrit une
partie de la trajectoire, au cours de laquelle le fil est tendu, ce dernier casse et, un peu plus tard, la turbine qui éjecte l'air ne fonctionne
plus. L'enregistrement obtenu est représenté sur le document suivant. Dans tout ce qui suit, le vecteur vitesse
V
est mis pour
)G(V
.
2. EXPLOITATION
1ère phase : G0 à G6
La trajectoire de G est un cercle de centre O. L'espace entre les points est constant, la vitesse est donc constante. Le mouvement est
circulaire uniforme.
2ème phase : G6 à G12
La trajectoire de G est une droite. L'espace entre les points est constant, la vitesse est donc constante. Le mouvement est rectiligne
uniforme.
3ème phase : G12 à G16
La trajectoire de G est une droite. L'espace entre les points diminue ce qui signifie que la vitesse diminue. Le mouvement est
rectiligne ralenti.
2.1. Etude de la première phase
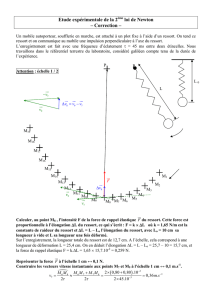
1- Référentiel : référentiel terrestre supposé galiléen Système : le mobile
Forces appliquées :
P
, poids du mobile
R
, réaction de la table
T
, tension du fil
Voici les caractéristiques des forces :
Poids
P
:
- point d'application : centre de gravité G
- direction : verticale
- sens : vers le centre de la Terre (vers le bas..)
+
Vue de profil
R
P
A
G
T
O

Page 5
16/04/2017
- valeur : P = mg
Réaction
R
:
- point d'application : un point de la surface de contact entre le mobile et la table
- direction : normale à la table, c'est à dire verticale car il n'y a pas de frottement
- sens : vers le haut
- valeur : R
Tension
T
:
- point d'application : le point A, point d'attache du mobile
- direction : la droite OA
- sens : de A vers O
- valeur : T
2-
TRPFEXT
Or, on admet (comment faire autrement ici ?) intuitivement que la réaction compense exactement le poids.
Il vient :
0RP
Finalement :
TFEXT
Il faut faire attention lors de la représentation :
4
T
n'a pas comme point d'application G4 mais A4.
3- Caractéristiques du vecteur vitesse
3
V
:
- Origine : le point
3
G
- Direction : tangente à la trajectoire au point G3 pratiquement parallèle à la droite(G2, G4)
- Sens : celui du mouvement à la date t3, de G2 vers G4
- Valeur :
3
10.202
2
10.0,32
24
G
2
G
3
V
= 1,5 m.s-1
Caractéristiques du vecteur vitesse
5
V
:
- Origine : le point
5
G
- Direction : tangente à la trajectoire au point G3 pratiquement parallèle à la droite(G4, G6)
- Sens : celui du mouvement à la date t5, de G4 vers G6
- Valeur :
3
10.202
2
10.0,32
26
G
4
G
5
V
= 1,5 m.s-1
La valeur du vecteur vitesse ne change pas mais sa direction change : le vecteur vitesse varie.
4- Explications préalables à l'oral :
Comme le vecteur vitesse varie, on a envie de déterminer sa variation et plus précisément sa variation en un
instant donné, sa variation instantanée. Comme les intervalles de temps sont faibles, on peut assimiler la
variation en un instant donné tn à la variation moyenne entre les instants tn-1 et tn+1 (même raisonnement que
pour la détermination de la vitesse instantanée). D'où :
354 VVV
On ne sait pas déterminer la différence de deux vecteurs mais la somme :
)V(VV 354
. De plus on
ramènera les vecteurs
5
V
et
)V( 3
avec la même origine en G4.
Caractéristiques du vecteur
4
v
:
 6
7
8
9
6
7
8
9
1
/
9
100%