se2 realisation d`un controle vectoriel

SE2 REALISATION D'UN CONTROLE VECTORIEL
SUR UN MAS A ROTOR BOBINE
Ce TP fait suite à celui intitulé "Schéma équivalent du MAS pour le contrôle vectoriel". Il s'inspire
d'articles parus dans la revue 3EI de 1993.
1>PRESENTATION
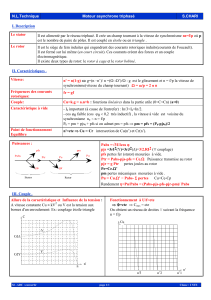
On peut établir un schéma équivalent par enroulement statorique, qui ramène toutes les fuites
magnétiques au stator sous forme d'une inductance Lf. Une inductance magnétisante Lm traduit l'existence
d'un flux magnétique tournant , résultant de l'action combinée des courants statoriques et rotoriques.La
résistance ramenée du rotor au stator est la résistance R/g. Ce schéma ne suppose aucune approximation
comme le fait de négliger l'inductance de fuite rotorique dans la zone de fonctionnement ou les pertes
statoriques. .Il est opérationnel à tous les régimes du moteur et en particulier aux basses fréquences.
Ls et Lr sont les Inductances cycliques statorique et rotoriques.
M est l'inductance mutuelle entre le stator et le rotor.
Lf = Ls Inductance de fuite totale ramenée au stator
Lm= (1 - )Ls Inductance magnétisante résultante
R = Rr(M/Lr)² Résistance rotorique ramenée au stator à g=1
Le courant statorique se partage en un courant inductif appelé courant "fluxant" Id et un courant "actif"
Iq qui transmet la puissance au rotor.On démontre que ces deux courant sont liés au courant statorique Is et
rotorique Ir par les relations:
Id = Is + M Ir / Ls (1- )
Iq = - Lr / M Ir
D'autre part le flux magnétique résultant, fourni par la branche inductive Lm, r est proportionnel à Id :
r = M Id
Le couple électromagnétique du moteur Ce est proportionnel au produit Iq r d'après:
C = (3 p M / Lr ) Iq r
Le contrôle vectoriel de traduit de la façon suivante:
A fréquence constante = cte on conserve le flux constant en maintenant Id = Cte =Idn et on vérifie
que le couple électromagnétique du moteur est proportionnel au courant actif Iq.
= cte
r = M Id = cte
C = K Iq
2>MESURES
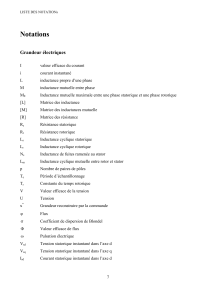
Pour mettre en œuvre cette théorie on procède comme suit:

> On associe un onduleur triphasé MLI ne présentant pas la fonction "contrôle vectoriel" (Un variateur
de la génération U/f dont la fonction "boost" a été invalidée convient, ou un variateur plus récent configuré en
U/f sans "boost") avec un M.A.S à rotor bobiné.
>L'asservissement à flux constant est réalisé en s'assurant que le courant "fluxant" Id reste constant à
tous les régimes du moteur.Pour cela un boitier d'acquisition et de synthèse du courant fluxant est réalisé à
l'aide de deux capteurs (*) de courant à sortie 0-25mA et d'un sommateur pondéré à résistances. (*) LEM LA
55-P/SP1
>Un autotransformateur triphasé placé entre le variateur et le moteur permet de corriger manuellement
la tension du moteur, sans changer la fréquence de l'onduleur, afin de réaliser la condition précédente.Pour
conserver une marge de règlage, il est préférable de travailler avec des fréquences inférieures à Fn/2.C'est
d'ailleurs en basses fréquence que le contrôle vectoriel s'avère utile pour conserver du couple.
>On se propose de vérifier la loi de proportionnalité entre le couple et le courant "actif ",à flux
constant et à différentes fréquences.
M.A.S
U
Variateur Is C ,
Ir
Id = Cte
MESURES
>Préparation:Calculer à l'aide des valeurs numériques des éléments du schéma équivalent et des éléments de la
plaque signalétique du moteur, les valeurs de Iq nom et Id nom et Cnom.
>Coupler le moteur en triangle.Ce couplage permet d'utiliser l'autotransformateur pour atténuer la tension.
Avec ce couplage, il est interdit de travailler bien au delà le fn/2 car les enroulements seraient en surtension.
>Caractéristique Iq = f (C ) , N(tr/min) = f (C) et U = f (C) à f = 25 hz et Id = cte = Id nom
-Veiller à ramener le variateur à la fréquence nulle avant le démarrage.
-Maintenir le courant en sortie du boitier d'acquisition Id constant en rectifiant, à l'aide de
l'autotransformateur, la tension d'alimentation sans jamais dépasser Vn aux bornes des enroulements du moteur.
-Tracer les graphes de ces deux caractéristiques en prenant des valeurs simples du couple entre 0 et Cn.
-Mettre en évidence les lois du contrôle vectoriel.Déterminer le coeffitent K = C / Iq.
>Caractéristique Iq = f (C ) , N(tr/min) = f (C) et U = f(C) à f = 10 hz et Id = cte = Id nom
-Reprendre le même travail.
-Tracer les graphes.
-Comparer avec les essais faits à bas régime en contrôle scalaire de flux (Variateur U/f seul).Dans ce deuxième
cas,à la fréquence de 10Hz et au couple nominal, le moteur tournait-il encore ?
-Mettre en évidence l'existence du couple nominal à basse fréquence et le phénomène de "boost" de tension
qui est nécéssaire pour cela.
-Retrouver les lois du contrôle vectoriel et le coeffitient K précédent
.
MLI
F=ct
e
Acquisition et
synthèse de Id
autoTR
1
/
2
100%