DYNAMIQUE DU SOLIDE EN ROTATION

Dynamique du solide en rotation.
Note : les symboles en caractère gras désignent des vecteurs.
1-Produit vectoriel de deux vecteurs :
Le produit vectoriel des 2 vecteurs V1 et V2 est un vecteur V3 noté :
2
Λ
13 VVV
et ayant les caractéristiques suivantes :
Direction : perpendiculaire au plan qui contient V1 et V2
Sens :il est tel que le trièdre :V1,V2,V3 soit direct.(*)
Sa norme est :
sin.. 213 VVV
(*) le sens est donné par la « règle de la main droite » : le trièdre est direct si l’index de la main
droite correspondant à V1, le majeur à V2, le pouce correspond à V3.
Exemple d’utilisation en physique : le moment d’une force M.
Fr)/F(M Λ
Le vecteur moment est perpendiculaire au plan contenant r et F, il est orienté comme l’indique la
figure ci-dessus et sa valeur est :
M(F/D)= r. F. sin = b. F
2-Solide en rotation autour d’un axe fixe :
Considérons un solide quelconque en rotation autour de l’axe .

Tous les points matériels du solide comme P de masse mi ont un mouvement circulaire de rayon
ri dont le centre est sur l’axe .
a-Moment cinétique élémentaire : c’est le moment par rapport à l’axe de la quantité de
mouvement mi.V. du point P.
)(.)(..... 2
)
(krmtuVmrtVmurVmrL iiiiii
P
i
puisque VP=.ri . est la vitesse angulaire du solide à la date t.
b-Le moment cinétique du solide à la date t est :
kJkrimiL
..... 2
En valeur algébrique
L = J.
Jest une grandeur qui caractérise la répartition de masse autour de l’axe du solide, c’est le
moment d’inertie du solide par rapport à l’axe de rotation.
L’unité SI de moment d’inertie est kg.m2.
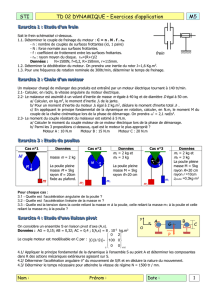
c-Moments d’inertie d’objets courants :
Tous les solides considérés ci-dessous sont supposés homogènes, de masse linéïque,
surfacique ou volumique ρ.
Tige de longueur L et de masse m

Cercle de rayon R et de masse m
Disque plein de rayon R et de masse m
Sphère creuse de rayon R et de masse m
Sphère pleine de rayon R et de masse m

d-étude dynamique de la rotation:
La dérivée par rapport à t de L, donne, d’une part :
)/()()()]().[( iiiiiiiiP
iFMFramr
dt
Vd
mrVmi
dt
rd
dt
Ld
En effet le 1er terme de la somme entre crochet est nul car la dérivée de r est colinéaire à V, et
le produit vectoriel de 2 vecteurs colinéaires est nul.
Enfin la dérivée par rapport à t de la vitesse n’est autre que l’accélération a du point P.
On obtient un résultat connu sous le nom de « théorème du moment cinétique » à savoir :
la dérivée du moment cinétique est égale à la somme des moments des forces extérieures
appliquées au solide.
Et d’autre part, si l’on considère l’expression de L en fonction du moment d’inertie :
k
dt
d
J
dt
Ld
.
Où d/dt est l’accélération angulaire instantanée du solide.
On obtient le théorème de l’accélération angulaire (relation ici algébrique):
dt
d
JM extF
.
/
La somme des moments des forces extérieures appliquées est égale au produit du moment
d’inertie du solide par rapport à l’axe de rotation par son accélération angulaire.
Cette relation est à comparer à :
amFext
.
pour un solide en translation.
Remarque : Un mouvement au sens le plus général peut être considéré à chaque instant
comme la superposition d’une translation et d’une rotation autour d’un axe.(par exemple le
mouvement d’une bille sur un plan incliné) Pour résoudre les équations du mouvement, les 2
équations encadrées si dessus sont nécessaires.
Dans le cas d’une rotation autour d’un axe fixe, la première relation suffit.
e/ cas particulier du mouvement de rotation uniforme :
Si le mouvement est circulaire et uniforme (la vitesse angulaire est constante): l’accélération
angulaire est nulle et donc la somme algébrique des moments appliquées au solide est nulle
également.
0/
Fext
Mcte
la constante pouvant être nulle (cas particulier de l’équilibre) .

Cette relation est analogue à celle en translation:
0
extGFcteV
1
/
5
100%