Dossier technique à constituer pour une demande d - E

Version du 09 avril 2013 page 1/24
AERONEF TELEPILOTE – HELICOPTERES MULTIROTORS
DOSSIER TECHNIQUE N°E-Copter S1000 VX1
Note : joindre au présent dossier les manuels d’utilisation et d’entretien de
l’aéronef.
Constructeur : DJI Innovations / E-Copter
Type/Modèle : S1000 VX1 – E-Copter
N° de série : ne rien indiquer si vous postulez à une attestation de conception de
type pour une construction en série
Catégorie : C : D X E
Scénario(ii) envisagé(s) : X S2 S3 S4 (voir § V)
Nombre de rotors : 4 6 X 8
Envergure cellule : 1,045 mètres
Masse maximale au décollage : 11 kilogrammes
Postulant :
E-COPTER SARL
18, Chemin des Chênes Blancs
06340 DRAP
France
Tél :06.19.83.44.49.
Fax :
Courriel :fabien@e-copter.com
Je soussigné M. DEREGEL FABIEN, Gérant de la SARL E-Copter
postulant à une autorisation particulière / X attestation de conception de type pour
l’aéronef, déclare que les informations contenues dans ce dossier sont exactes.
Date : 25 mai 2014
Signature :
N° de MAJ
Date
Modifié par
Pages modifiées
Description des
modifications
Rev 0
30/03/2014
F.Deregel
toutes
Soumission document DGAC
Rev 1
31/03/2014
F. Deregel
10
Correction
Rev 2
25/05/2014
F. Deregel
toutes
Correction datalink

Version du 09 avril 2013 page 2/24
SOMMAIRE
I PLAN TROIS VUES.......................................................................................................................................................... 2
II DESCRIPTIF .................................................................................................................................................................... 3
II.1 Rotors : .................................................................................................................................................................. 3
II.2 Fuselage ................................................................................................................................................................ 3
II.3 Devis de masse ..................................................................................................................................................... 3
II.4 Centrage ................................................................................................................................................................ 4
II.5 Moteur électrique ................................................................................................................................................... 4
II.6 Câble de retenue (si applicable) : ........................................................................................................................... 5
III . SYSTEMES DE CONTRÔLE .................................................................................................................................... 5
III.1 Modes de contrôle ................................................................................................... Error! Bookmark not defined.
III.2 Eléments embarqués ............................................................................................................................................. 7
III.3 Emetteur ................................................................................................................................................................ 8
III.4 Portée radio (antenne émission déployée) ............................................................................................................. 9
III.5 Moyen de contrôle des batteries de la station sol ................................................................................................... 9
III.6 Moyen de contrôle des batteries de l’aéronef ......................................................................................................... 9
III.7 Plans de cablage ................................................................................................................................................... 9
IV . PANNES .................................................................................................................................................................... 16
IV.1 Généralités : ........................................................................................................................................................ 16
IV.2 Traitements des pannes ....................................................................................................................................... 18
V OPERATIONS PREVUES .............................................................................................................................................. 20
V.1 Scenarii opérationnels prévus .............................................................................................................................. 20
V.2 Données complémentaires à fournir pour un scénario S-4 ................................................................................... 21
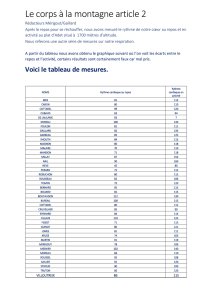
I PLAN TROIS VUES
(Pas de plan à main levée)
Faire un scan ou une photocopie d'un plan existant

Version du 09 avril 2013 page 3/24
II DESCRIPTIF
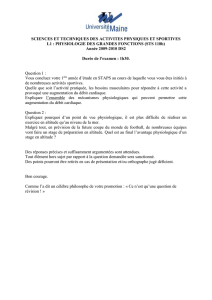
II.1 Rotors :
- Nombre : 8
- Type : Rigide
Articulé X Montés sur sillent bloc (4 par moteur)
Balancier
- Nb de pales (Hélices) : 8 hélices repliables en plastique PA6GFxx (renforcé
fibre), sur supports aluminium , avec vis Inox A2 , serrage 0,4 NM.
- Diamètre : 15 pouces
- Pas : 5
- Matériau : Pales Moyeu
Bois
Aluminium X Aluminium 6061
Fibre de carbone
Nylon X (renforcé fibre)
Fabricant : DJI Innovations
- Vis de fixation (pour moyeu): Nombre : 2
Type : Acier classe 10 / traitement de surface
Diamètre : M3 x 8
- Autre (description) : Vis de fixation communes hélices repliables / support
hélices (moyeu).
Fuselage
- Envergure : 1045 mm
- Masse : 1330 Grammes (incluant trains rentrants et support)
- Matériau : bois
aluminium
fibre carbone X
fibre verre X
- Autre (description) : Chassis central composé de deux plaques de fibre de
verre et d’une plaque de carbone en renfort pour trains d’atterrissage
II.2 Devis de masse
- Masse à vide (sans batteries) : 4,4
- Masse batteries: 2 à 3 KG ( selon batteries utilisées, de 10 000 à 20 000 mAh,
6S lipo, 15C minimum)
- Masse de la charge utile : Variable selon configuration batteries, poids total
en vol ne devant pas excéder 11 Kg

Version du 09 avril 2013 page 4/24
- Masse totale : 11 Kg au décollage.
II.3 Centrage
- Référence : Croisement axes des 8 bras de rotors. Centre châssis.
- Limites de centrage : +/- 4 cm tolérés, +/- 1cm recommandé pour des
performances optimales.
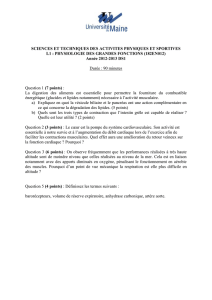
II.4 Moteur électrique
Description : joindre une notice descriptive
- Marque : DJI Innovations
- Type : moteur brushless, à cage tournante. Modèle 4114 PRO
- Réducté Prise directe X
- Nombre : 8
- Puissance Max unitaire en W : 500
- Régime maximal : 10 000 tours / / minute
- Tension d’alimentation : 20V à 25,2 V
- Masse : 1585 Grammes
- Fixation moteur : Rigide
Souple X (amortisseurs de vibration)
Diamètre des vis : M3 x 8
( Copie de la notice descriptive par extrait du manuel officel DJI S1000 Rev. 1,04 )

Version du 09 avril 2013 page 5/24
II.5 Câble de retenue (si applicable) :
- Longueur maximale :
- Matière :
- Diamètre :
- Résistance en traction (daN) :
-
- Fixation : au sol : nb de points d’accrochage :
au télépilote ou à un opérateur avec harnais
- Enrouleur : manuel
III MOTORISE . SYSTEMES DE
CONTRÔLE
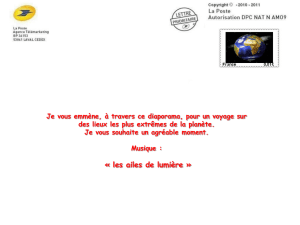
III.1 Contrôleur
Fabricant : DJI Inovations, Centrale de vol « A2 » + IOSD V2 / MARK II
(Enregistreur de vol et télémétrie sur écran vidéo)
Version du(es) logiciel(s) :
- Contrôleur Principal A2 : 2.1 et supérieure (Nota : Tous les composants tels que la
centrale inertielle, le module d’alimentation, la Led /interface USB/Bluetooth et le GPS
/Compas doivent avoir été mis à jour en fonction de la version de micrologiciel du
contrôleur principal ( MCU)
- IOSD Mark II / V2 : 3.0
- DATALINK ( PC ou IOS) permettant le suivi hors vue de l’aéronef
2.1 (Contrôleur Principal)
Mode(s) de contrôle principal(aux) : X automatique
X manuel en vue
X manuel hors vue
Quels sont les basculements possibles entre modes en cas de pannes ? :
Mode Manuel, Mode Fail Safe, Mode Attitude, Fail Crash, Retour position départ.
Capteur d’altitude barométrique embarqué : X oui non
Affichage de l’altitude de l’aéronef sur station sol : X oui non
Système(s) de positionnement :
Principe(s) : X GPS
X centrale inertielle
X magnétomètre
balises radio au sol (fréquence : )
autre :
Affichage sur station sol : X cartographie (Datalink)
X coordonnées (Datalink /IOSD)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%