Mathématiques Géométrie métrique Géométrie métrique : Angles

Mathématiques
Géométrie métrique
Pierre Mathonet
Département de Mathématique
Faculté des Sciences
Liège, printemps 2016
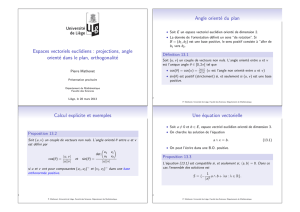
Géométrie métrique : Angles non orientés du plan
Définition. (Angle non orienté)
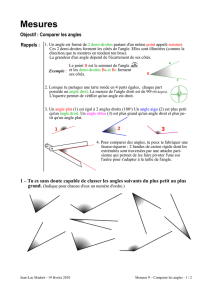
Dans le plan, un angle non orienté est une portion de plan déterminée par
deux demi-droites de même origine. Il y en a deux, et on doit préciser
lequel on considère, généralement en dessinant un arc de cercle.
A
O
B
α
A
O
B
α0
•L’angle non orienté est indépendant de l’ordre dans lequel on précise
les demi-droites. Il se mesure en degrés.
•L’angle nul correspond à des demi-droites confondues. Cette
situation correspond aussi à l’angle plein : 360◦;
•L’angle plat correspond à deux demi-droites distinctes [O,Aet [O,B
telles que A,O,Bsoient alignés. Il vaut 180◦;
•Un angle droit correspond à 90◦(ou 270◦).
2
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Angles non orientés dans l’espace, perpendicularité
•Etant donné deux demi-droites de même origine [O,A[et [O,B[
dans l’espace, trois cas peuvent se produire :
1Les points A,Oet Bne sont pas alignés, alors ils déterminent un
plan unique, et l’angle des demi-droites [O,A[et [O,B[est défini
dans ce plan.
2Les points A,O,Bsont alignés et les demi-droites [O,A[et [O,B[
sont confondues. Alors l’angle de ces demi-droites vaut 0◦ou 360◦.
3Les points A,O,Bsont alignés et les demi-droites [O,A[et [O,B[ne
sont pas confondues. Alors l’angle de ces demi-droites vaut 180◦.
•Deux droites du plan ou de l’espace sont perpendiculaires si elles
sont sécantes et si les angles qu’elles déterminent sont droits.
•Deux droites de l’espace sont orthogonales si elles sont parallèles (2
à 2) à des droites perpendiculaires.
3
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Quelques théorèmes sur les angles non orientés
Angles correspondants, alternes internes-alternes externes, opposés
Une sécante détermine avec deux droites parallèles des angles opposés
par le sommet, alternes internes, correspondants et alternes externes de
même amplitude.
α
β
γ
δ
Figure: Des angles égaux déterminés par une sécante sur des parallèles.
4
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.

Angles à côtés parallèles ou perpendiculaires
Proposition. (Angles égaux ou supplémentaires)
Des angles à côtés parallèles sont soit égaux, soit supplémentaires. Des
angles à côtés perpendiculaires sont soit égaux, soit supplémentaires.
Un triangle équilatéral et une médiane :
A B
C
D
60◦
30◦
Figure: Un triangle équilatéral et des angles de 60◦et 30◦.
5
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Géométrie euclidienne : distances
•En géométrie, la distance entre deux points Aet Bdans le plan ou
dans l’espace est mesurée avec une latte graduée. Elle s’exprime en
cm, m, ... On la note d(A,B)ou encore AB.
•En physique, c’est généralement l’intensité d’une force.
Théorème de Pythagore
Soient A,B,Cdes points non alignés. Alors le triangle ABC est rectangle
en Csi et seulement si on a
AB2=AC2+BC2.
Remarque : BC =CB. Il s’agit de la distance, pas du vecteur.
6
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Distances et reprères
Calcul de la distance dans un système d’axes :
0
O
1
E1
A
B
a1
a2
x
y
1
E2
b2
b1
CC0
1
•Pour que cela ait un sens, il faut les mêmes unités sur les deux axes !
•Les coordonnées de Csont faciles à trouver, mais ne servent à rien
pour calculer la distance.
•Les coordonnées de C0ne sont pas faciles à trouver.
7
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Cas particulier : repères orthonormés
•En géométrie, un repère orthonormé du plan est un repère où les
axes sont perpendiculaires et où les points E1,E2sont à la même
distance de O.
•Un repère orthonormé de l’espace est formé de trois axes
perpendiculaires deux à deux, où les points E1,E2,E3sont à la
même distance de O.
O1
A
B
a1
a2
x
y
1
b2
b1
C: (b1,a2)
Les longeurs des segments [A,C]et [C,B]sont données par |b1−a1|et
|b2−a2|respectivement.
8
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.

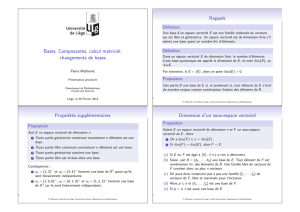
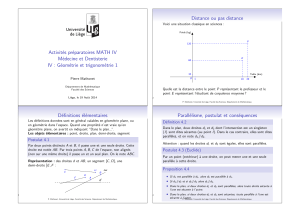
Calcul de la distance dans un repère orthonormé
Proposition
Dans un repère orthonormé du plan, la distance du point A ayant pour
coordonnées (a1,a2)au point B ayant pour coordonnées (b1,b2)est
donnée par
d(A,B) = p(b1−a1)2+ (b2−a2)2.(1)
Dans un repère orthonormé de l’espace la distance du point A ayant pour
coordonnées (a1,a2,a3)au point B ayant pour coordonnées (b1,b2,b3)
est donnée par
d(A,B) = p(b1−a1)2+ (b2−a2)2+ (b3−a3)2.(2)
Exemple : dans un repère orthonormé du plan, la distance entre
A: (−2,4)et B: (3,5)est
p(3−(−2))2+ (5−4)2=√26.
9
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Vecteurs libres en géométrie euclidienne
•En géométrie euclidienne, les nombres calculés via (1) ou (2) sont
appelés longueur ou norme du vecteur −→
AB. On la note |−→
AB|ou
k−→
ABk.
•En sciences, on parle rarement de longueur, mais bien de norme. Si
−→
vmodélise une force, alors sa norme est son intensité (et s’exprime
donc dans les unités adéquates).
•Nous avons défini un vecteur libre comme un ensemble de couples
équipollents. En géométrie euclidienne, puisqu’on a la notion de
norme à disposition, on peut donner une autre caractérisation : un
vecteur non nul est caractérisé par
1sa direction (une droite dont c’est un vecteur directeur);
2sa norme;
3son sens.
10
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Cercles et sphères
Définition
Le cercle de centre Cet de rayon r>0 est l’ensemble de tous les points
Xdu plan qui sont à une distance rde C.
Dans un repère orthonormé du plan, si C: (c1,c2), alors un point Xde
coordonnées (x,y)est sur le cercle en question si, et seulement si
(x−c1)2+ (y−c2)2=r2
.
Définition
La sphère de centre Cet de rayon r>0 est l’ensemble de tous les points
Xde l’espace qui sont à une distance rde C.
Dans un repère orthonormé de l’espace, si C: (c1,c2,c3), alors un point Xde
coordonnées (x,y,z)est sur la sphère en question si, et seulement si
(x−c1)2+ (y−c2)2+ (z−c3)2=r2
.
11
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Angle de deux vecteurs, orthogonalité
Si −→
uet −→
vsont des vecteurs libres, on les lie en un point et on a deux
angles :
−→
u
−→
v
B
A
C
α
360◦−α
Définition. (Angle de deux vecteurs)
L’angle de deux vecteurs libres −→
uet −→
vest le plus petit des deux angles
que ces vecteurs définissent quand on les lie en un point. C’est donc un
angle compris entre 0◦et 180◦.
12
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.

Vecteurs orthogonaux
Définition. (Vecteurs orthogonaux)
Des vecteurs non nuls −→
uet −→
vsont orthogonaux si l’angle qu’ils
définissent vaut 90◦. Le vecteur nul est orthogonal à tout vecteur.
Proposition. (Condition d’orthogonalité)
Des vecteurs −→
uet −→
vdonnés par leurs composantes dans un repère
orthonormé −→
u: (u1,u2)et −→
v: (v1,v2)sont orthogonaux si, et seulement
si, on a
u1v1+u2v2=0.(3)
Preuve : C’est le théorème de Pyhtagore.
Exemples : SI on se donne les vecteurs dans un R.O.,
•les vecteurs −→
u: (3;4)et −→
v: (−1;2)ne sont pas orthogonaux
•les vecteurs −→
u: (4;1)et −→
v(2;−8)sont ortogonaux.
13
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Condition de perpendicularité de droites
Proposition
Dans un repère orthonormé, les droites d ≡ax +by +c=0et
d0≡a0x+b0y+c0=0sont perpendiculaires si, et seulement si, on a
a a0+b b0=0.
Dans un repère orthonormé, d ≡y=mx +p et d0≡y=m0x+p0sont
perpendiculaires si, et seulement si, on a
m m0+1=0.
Dans un repère orthonormé, si d ≡ax +by +c=0, alors le vecteur
−→
n: (a,b)est orthogonal à tous les vecteurs directeurs de d.
Exemple : Les droites d≡3x+2y=5 et d0≡2x−3y=7 sont
perpendiculaires.
Exercice : Ecrire une équation de la perpendiculaire à dpassant par
A: (2,5).
14
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Médiatrice d’un segment
Définition
La médiatrice du segment [A,B]est l’ensemble des points du plan situés
à égale distance de Aet B.
Proposition
Dans un repère orthonormé, si A : (a1,a2)et B : (b1,b2), alors la
médiatrice de [A,B]a pour équation
(b1−a1)(2x−(a1+b1)) + (b2−a2)(2y−(a2+b2)) = 0
En particulier, c’est une droite qui est prependiculaire à AB et qui
contient le mileiu de [A,B].
15
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
Angles orientés du plan
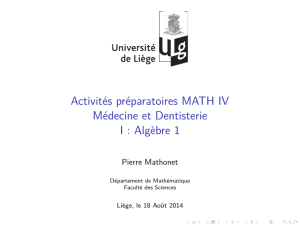
•Dans le plan, on a deux sens de rotation :
1Le sens trigonométrique positif, opposé à celui des aiguilles de la
montre;
2Le sens trigonométrique négatif : celui des aiguilles de la montre.
A
B
C
45◦
−315◦
A
B
C
315◦
−45◦
L’angle
[
ABC vaut 45 degrés. L’angle d
CBA vaut 315 degrés (ou -45
degrés). On peut prendre comme convention un angle entre 0◦et 360◦
•Dans l’espace, il n’y a pas de sens trigonométrique privilégié, donc pas
d’angle orienté entre deux demi-droites ou deux vecteurs.
16
P. Mathonet, Université de Liège, Faculté des Sciences, Département de Mathématique.
1
/
4
100%