Partie I - Angles d`Euler

MPSI B DM 14 9 avril 2017
−→
i−→
j
−→
k
ψ
−→
k1
−→
j1
−→
u
ϕ
−→
i1
θ
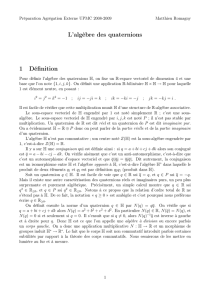
Fig. 1 – Angles d’Euler
Dans la premi`ere partie, on introduit des angles d’Euler pour rep´erer les rota-
tions d’un espace vectoriel euclidien orient´e de dimension 3.
Dans la suite on introduit les quaternions de Hamilton comme des matrices 2 ×2 `a
coefficients complexes et diverses structures sur cet espace. On d´efinit en particu-
lier un R-espace vectoriel euclidien de dimension 3 form´e de quaternions dits purs.
Bien que, de nature matricielle par d´efinition, les quaternions purs seront regard´es
le plus souvent comme des vecteurs. On retrouve `a la fin les angles d’Euler en
termes de quaternions.
Partie I - Angles d’Euler
Soit (−→
i , −→
j , −→
k) et (−→
i1,−→
j1,−→
k1) deux bases orthonorm´ees directes. On suppose
que (−→
k , −→
k1) est libre. Il existe alors une unique rotation rtelle que
r(−→
i) = −→
i1, r(−→
j) = −→
j1, r(−→
k) = −→
k1
On se propose de d´efinir les trois angles d’Euler θ, ϕ, ψ qui permettent de rep´erer
(−→
i1,−→
j1,−→
k1) et de d´ecomposer ren trois rotations d’angles θ, ϕ, ψ autour d’axes
orient´es s’exprimant tr`es simplement avec (−→
i , −→
j , −→
k).
Soit θl’´ecart angulaire entre −→
ket −→
k1. Il existe un unique vecteur unitaire −→
u
orthogonal `a −→
ket −→
k1tel que −→
k1=r−→
u ,θ(−→
k). On notera
r1=r−→
u ,θ
Soit ϕl’unique r´eel dans [0,2π[ tel que −→
u=r−→
k ,ϕ(−→
i). On notera
r2=r−→
k ,ϕ
Soit ψl’unique r´eel dans [0,2π[ tel que −→
i1=r−→
k1,ψ(−→
u). On notera
r3=r−→
k1,ψ
1. Calculer r3◦r1◦r2(−→
i) et r3◦r1◦r2(−→
k). En d´eduire que r3◦r1◦r2=r.
2. Soit −→
wun vecteur non nul, αun r´eel quelconque et fune rotation. Montrer
que
f◦r−→
w ,α ◦f−1=rf(−→
w),α
3. On adopte les notations suivantes :
rϕ=r2=r−→
k ,ϕ, rψ=r−→
k ,ψ, Rθ=r−→
i ,θ
Que valent rϕ(−→
i) et r1(−→
k) ? Exprimer r1`a l’aide de rϕet Rθ. En d´eduire
r=rϕ◦Rθ◦rψ
´
Ecrire sous la forme d’un produit, la matrice de rdans la base (−→
i , −→
j , −→
k).
Cette cr´eation est mise `a disposition selon le Contrat
Paternit´e-Partage des Conditions Initiales `a l’Identique 2.0 France
disponible en ligne http://creativecommons.org/licenses/by-sa/2.0/fr/
1R´emy Nicolai M0514E

MPSI B DM 14 9 avril 2017
Partie II - Quaternions.
On appelle quaternion toute matrice complexe
q=a−b
b a avec (a, b)∈C2
On note Hl’ensemble des quaternions et on adopte les conventions suivantes :
q=a b
−b a
N(q) = det(q) = |a|2+|b|2
Un quaternion qest dit vectoriel ou pur si et seulement si q=−q.
On note El’ensemble des quaternions purs, ils seront ´ecrits g´en´eralement avec une
fl`eche. On pose en particulier
1H=1 0
0 1,−→
i=0i
i0,−→
j=0−1
1 0 ,−→
k=i0
0−i
1. Montrer que Hest un sous-espace vectoriel du Respace vectoriel M2,2(C),
stable pour la multiplication matricielle. V´erifier que (1H,−→
i , −→
j , −→
k) est une
base de Het que (−→
i , −→
j , −→
k) est une base de E.
Dans la suite, Eest orient´ee par cette base, c’est `a dire que (−→
i , −→
j , −→
k) est
directe.
2. V´erifier que qq =N(q)1H. Montrer que si q6= 0H, la matrice qest inversible
avec
q−1=1
N(q)q
En d´eduire que q−1∈H.
3. Montrer que pour tout couple (q, q0) de quaternions, qq0=q0q
4. Soit q∈H, montrer 1
2(q−q)∈E. On posera
−→
Vq=1
2(q−q)
On dit que −→
Vqest la partie vectorielle de q. V´erifier que
q=1
2tr(q)1H+−→
Vq
Partie III - Multiplications
On d´efinit une application Sde Hdans Hpar :
∀q∈H:S(q) = q
Soit q∈H, on d´efinit des applications gqet dqpar :
∀q∈H:gq(q0) = qq0, dq(q0) = q0q
Soit q∈Hnon nul, on d´efinit une application Cqpar :
∀q∈H:Cq(q0) = qq0q−1
1. V´erifier que S,gq,dq,Cqsont des endomorphismes de H. Lorsque qest
un quaternion non nul, exprimer dq−1puis Cq`a l’aide du r´eel N(q) et des
applications Set gq.
2. a. Calculer la matrice de gqdans la base (1H,−→
i , −→
j , −→
k) en fonction de
α, β, γ, δ lorsque
q=a−b
b a avec a=α+iβ, b =γ+iδ.
b. Calculer det gq.
3. Calculer det Cq.
Partie IV - Produit scalaire
Pour tout couple (−→
u , −→
v) de quaternions purs, on pose
(−→
u /−→
v) = −1
2tr(−→
u−→
v)
1. V´erifier que la formule du dessus d´efinit un produit scalaire sur Eet que
(−→
i , −→
j , −→
k) est une base orthonorm´ee.
2. L’espace vectoriel euclidien de dimension 3 Eest orient´e en d´ecr´etant que
(−→
i , −→
j , −→
k) est directe. Le produit vectoriel dans cet espace est not´e ∧. Mon-
trer que
−→
u∧−→
v=−→
V−→
u−→
v=1
2(−→
u−→
v−−→
v−→
u),−→
u−→
v=−(−→
u /−→
v)1H+−→
u∧−→
v
Cette cr´eation est mise `a disposition selon le Contrat
Paternit´e-Partage des Conditions Initiales `a l’Identique 2.0 France
disponible en ligne http://creativecommons.org/licenses/by-sa/2.0/fr/
2R´emy Nicolai M0514E

MPSI B DM 14 9 avril 2017
Bien prendre garde `a ne pas confondre
– le produit matriciel −→
u−→
v.
– le produit vectoriel −→
u∧−→
vqui s’´ecrit aussi 1
2(−→
u−→
v−−→
v−→
u) `a l’aide d’op´erations
matricielles.
– le produit scalaire (−→
u /−→
v) qui s’´ecrit −1
2tr(−→
u−→
v) `a l’aide d’op´erations ma-
tricielles.
Parties V - Rotations
Dans cette partie, qd´esigne un quaternion non nul avec
q=a−b
b a et a=α+iβ, b =γ+iδ.
L’application Cqest d´efinie dans la partie III.
1. a. Montrer que Eest stable par Cq.
On notera cql’application de Edans Equi coincide avec Cq.
b. Montrer que det cq= 1.
c. Montrer que cqest une rotation.
2. a. Calculer (cq(−→
i)/−→
i), (cq(−→
j)/−→
j), (cq(−→
k)/−→
k) en fonction de α, β, γ, δ.
b. En d´eduire tr cq. Dans quel cas a-t-on tr cq= 3 ?
On suppose dans toute la suite que q6∈ Vect 1Hc’est `a dire que −→
Vq6=−→
OE.
3. Montrer que cqn’est pas l’identit´e et que cq(−→
Vq) = −→
Vq.
4. Montrer que pour tout −→
u∈E:
(cq−cq
−1)(−→
u) = 4α
N(q)
−→
Vq∧−→
u
En d´eduire que cqest un demi tour si et seulement si q∈E. Quel est alors
son axe ?
On suppose dans la suite que q6∈ Vect 1Het q6∈ E. Il existe alors un unique
θ∈]−π, π[ tel que cq=rθ,
−→
Vq.
5. a. Quelle est la matrice de cq(en fonction de θ) dans une base orthonorm´ee
directe de la forme (−→
a , −→
b , 1
N(−→
Vq)
−→
Vq) ?
b. Montrer que
cos θ=α2− k−→
Vqk2
N(q),sin θ=2αk−→
Vqk
N(q)
c. En d´eduire l’expression de tan θ
2en fonction de αet de k−→
Vqk. Cette
expression d´etermine-t-elle un unique θdans ] −π, π[ ?
Partie VI - Quaternions et angles d’Euler
1. Soit ω∈]0, π[, pr´eciser les ´el´ements g´eom´etriques de cqpour les deux qsui-
vants :
q=eiω 0
0e−iω, q =cos ω i sin ω
isin ωcos ω
2. Soit θ,ϕ,ψtrois nombres r´eels, calculer le produit matriciel
eiφ
20
0e−iφ
2!cos θ
2isin θ
2
isin θ
2cos θ
2 eiψ
20
0e−iψ
2!
3. Soit qun quaternion de norme 1 qui n’est ni r´eel ni vectoriel (pur), expliquer
comment se calculent les angles d’Euler θ,ϕ,ψqui permettent de d´ecomposer
la rotation cq.
Cette cr´eation est mise `a disposition selon le Contrat
Paternit´e-Partage des Conditions Initiales `a l’Identique 2.0 France
disponible en ligne http://creativecommons.org/licenses/by-sa/2.0/fr/
3R´emy Nicolai M0514E
1
/
3
100%