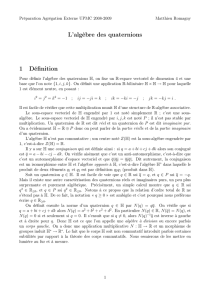
Notre séminaire

Séminaire : Quaternions et autres nombres
hypercomplexes
Lacoste Cyril
Pierron Théo
ENS Ker Lann

2

Table des matières
I Première approche des quaternions . . . . . . . . . . . . . . . 1
I.1 Découverte ........................ 1
I.2 Définition et premières propriétés . . . . . . . . . . . . 1
I.3 Le théorème de Frobenius . . . . . . . . . . . . . . . . 3
II Quaternions et rotations . . . . . . . . . . . . . . . . . . . . . 5
II.1 SO3≃S3/{±1}...................... 5
II.2 SO4/{±1} ≃ SO3×SO3................. 7
II.3 SU2/{±1} ≃ SO3..................... 8
III Applications............................ 9
III.1 Théorème des 4 carrés . . . . . . . . . . . . . . . . . . 9
III.2 Infographie . . . . . . . . . . . . . . . . . . . . . . . . 10
III.3 Fractales.......................... 15
III.4 Octonions et sédénions . . . . . . . . . . . . . . . . . . 17
i

ii TABLE DES MATIÈRES

Table des figures
1 Un réseau de R2.......................... 9
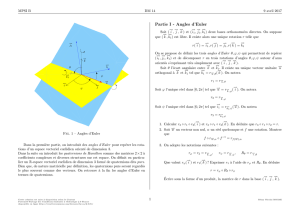
2 Anglesd’Euler........................... 13
3 État normal des cardans . . . . . . . . . . . . . . . . . . . . . 14
4 Blocage des cardans . . . . . . . . . . . . . . . . . . . . . . . . 14
5 Ensemble de Mandelbrot ................... 16
6 Mandelbulb ............................ 17
iii
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%