Cours sur l'Asservissement : Systèmes Automatiques et Performances
Telechargé par
Meryem Bouziane

Asservissement Cours
Lycée Henri Poincaré Page 1 sur 16
INTRODUCTION A L’AUTOMATIQUE
Système automatique
Définitions
Un système automatique est un système assurant des fonctions avec peu ou sans intervention
humaine.
L’automatique est la discipline scientifique traitant, d’une part, de la caractérisation des systèmes
automatisés et d’autre part du choix, de la conception, et de la réalisation du système de commande.
Il s’agit donc de modéliser le comportement complexe des systèmes :
Réalisant leurs fonctions en relative autonomie,
Assurant un contrôle des performances par la mise en place possible d’une chaîne d’acquisition
(boucle de retour).
Structure d’un système automatisé : Chaîne fonctionnelle
Représentation
Une chaîne fonctionnelle est représentée par des blocs reliés entre eux par des liens.
Chaque bloc représente un constituant.
Système de commande continu
Les systèmes étudiés dans ce cours sont constitués de grandeurs physiques continues. La grandeur de
sortie (mettant en jeu généralement des énergies importantes) est pilotée par la grandeur d’entrée ou
commande (faible énergie). Il est alors possible de définir une relation entrée-sortie.
Figure 1 : Description d'un système de commande
Sciences de
l’Ingénieur
Résumé
Chaîne Information
Chaîne d’énergie
Alimenter
Stocker
Moduler Convertir
Ordres
Acquérir
Coder
Traiter
mémoriser
Communiquer
restituer
Agir
MO
tt
MO
tt
Transmettre
Grandeurs
physiques
internes
et/ou
extérieures
informations
issues d’autres
systèmes
consignes de
l’opérateur
Info pour
l’opérateur
Info vers
d’autres
systèmes
Energie(s) d’entrée
(Pression, tension)
CAPTEUR ,
INTERFACE
HOMME/MACHINE
UNITE DE TRAITEMENT :
Automates
programmables, circuits
logiques,
Commandes
Tout ou Rien,
réseaux, bus, …
Tuyaux,
raccords, fils
PREACTIONNEUR :
Distributeur,
contacteur tripolaire, ACTIONNEUR :
Vérin, moteur,…
Chaînes, engrenages,
embiellages, …
Asservissement Cours
Lycée Henri Poincaré Page 2 sur 16
L’énergie nécessaire à la grandeur de sortie ne provient pas directement de la commande. Elle est apportée
dans le système via un préactionneur (ou amplificateur).
Système de commande en chaîne directe
Un système fonctionne en chaîne directe s’il n’y a
pas de contrôle sur la manière dont la consigne a été
exécutée.
Perturbation
Une perturbation est une autre cause agissant
sur le système. C’est une grandeur d’entrée qui
n’est pas contrôlée.
Système de commande en Boucle
fermée (chaîne fermée)
Un système fonctionne en boucle fermée si une mesure de la sortie est réalisée afin de la comparer à
la consigne et d’agir en conséquence.
Système asservi
Définition d’un système asservi
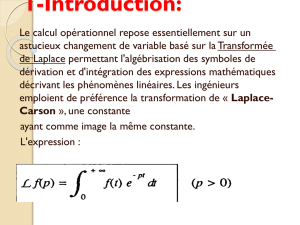
Un système asservi est un système bouclé dans lequel la grandeur de retour est comparée à la
grandeur d’entrée par élaboration d’un signal, appelé écart. Ce signal écart est adapté et amplifié
afin de commander la partie opérative.
A retenir, un système asservi est un système :
o à amplification de puissance
o en boucle fermée
Figure 2 : Schéma bloc d’un système asservi
Système régulateur ou suiveur
On distingue généralement les systèmes régulateurs où la consigne est constante (l’asservissement
corrige les effets des perturbations) et les systèmes suiveurs où la consigne évolue continûment
(l’asservissement suit la consigne).
Un réfrigérateur est un système régulateur tandis que la fusée Ariane est un système suiveur.

Asservissement Cours
Lycée Henri Poincaré Page 3 sur 16
Performances d’un système asservi
Régime permanent
Le régime permanent correspond au moment où le signal de sortie est établi (temps grands)
Précision
Stabilité
La stabilité est la capacité du système à converger vers une valeur constante pour
t→+∞
.
Régime transitoire
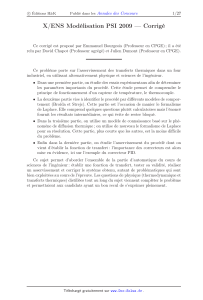
Rapidité
La rapidité est caractérisée par le temps que met le système à réagir à une variation brusque de la grandeur
d’entrée. Cependant la valeur finale étant le plus souvent atteinte de manière asymptotique on retient alors
comme principal critère d’évaluation de la rapidité d’un système, le temps de réponse à n% (en pratique le
temps de réponse à 5%).
C’est le temps au bout duquel la réponse du système reste dans une bande de 5% centrée sur la valeur
visée.
t
s
tn%
O
1
1+
1-
n%
n%
Asservissement Cours
Lycée Henri Poincaré Page 4 sur 16
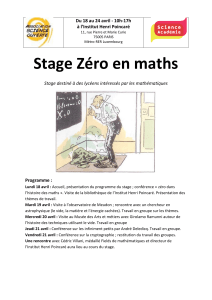
Amortissement
L’amortissement est caractérisé par le rapport entre les amplitudes successives des oscillations de la sortie.
Plus ces oscillations s’atténuent rapidement, plus le système est amorti.
système peu amorti
système fortement amorti
système bien amorti
Pour caractériser la qualité de l’amortissement on peut
retenir deux critères :
le taux de dépassement, qui caractérise
l’amplitude maximale des oscillations,
le temps de réponse à 5 %
Il est à noter que pour certaines applications (l’usinage
par exemple) un comportement oscillant n’est pas
autorisé et tout dépassement est inacceptable.
NOTION DE MODELISATION
On distingue trois phases dans la modélisation :
1. Isoler le système étudié en positionnant la frontière et en recensant les entrées sorties.
2. Effectuer une décomposition en sous-systèmes plus facilement exploitable.
3. Établir un modèle de connaissance ou de comportement pour chaque sous-système.
Un modèle de connaissance est un modèle obtenu à partir de lois physiques. Cette modélisation est
analytique et possède un sens physique fort.
Un modèle de comportement est un modèle dans lequel le sous-système est remplacé par une boîte
noire. Le comportement réel est identifié au mieux à partir de résultats expérimentaux.
Cadre de l’Etude
Système monovariable
Un système monovariable est un système ne
possédant qu'une seule entrée et qu’une seule
sortie.
Système invariant
Un système invariant est un système dont les
caractéristiques de comportement ne se
modifient pas dans le temps (« le système ne
vieillit pas »)
Système continu
Un système est continu est un système où
les variables d’entrée et de sortie sont
définies pour tout instant t.
t
s
t5%
O
1
D
0.95
1.05

Asservissement Cours
Lycée Henri Poincaré Page 5 sur 16
Système linéaire
Un système linéaire est un système où l’effet (signal de sortie) sera toujours proportionnel à la cause
(signal d’entrée).
La relation de comportement d'un système linéaire peut se mettre sous la forme
d'une équation différentielle linéaire à coefficients constants.
Modélisation des systèmes linéaires continus invariants
Représentation par
schémas blocs
Un système sera
représenté par un schéma
bloc ou (schéma bloc
fonctionnel), dans lequel on
pourra distinguer :
Les blocs :
Chaque sous-système est
représenté par une boîte
noire (bloc fonctionnel).
Chaque bloc fonctionnel
possède une seule entrée et une seule sortie (système monovariable).
A chaque bloc fonctionnel correspond une équation différentielle linéaire à coefficients constants :
(
)
(
)
11
00
() () () ()
nm
++ + = ++
nmm
n
dst dst det det
aaas(t)b b+be(t)
dt dt dt dt
KK
Fonction de transfert associée à un système
Le modèle mathématique (ou modèle dynamique) de comportement d'un système monovariable, linéaire,
continu et invariant peut être décrit une équation différentielle à coefficients constants :
() ()
11
00
() () () ()
nm
++ + = ++
nmm
n
dst dst det det
aaas(t)b b+be(t)
dt dt dt dt
KK
avec nm>
Les transformées de Laplace permettent alors de travailler aisément avec ce type d'équation (voir le chapitre
transformée de Laplace ) :
(
)
(
)
a p + +a p+a S(p)= b p + +b p+b E(p)
n
n
m
m
LL
1010
⋅⋅
On appelle fonction de transfert ou transmittance la fonction H(p):
H(p)= S(p)
E(p) =bp + +bp+b
ap+ + apa =N(p)
D(p)
m
m
n
n +
L
L
10
10
La transmittance du système est une fraction rationnelle en p.
H(p) représente le comportement du système indépendamment du signal d'entrée. Le schéma bloc
dans le domaine de Laplace, définit le modèle mathématique du système :
H(p)
E(p) S(p)
La relation entrée-sortie du système se met sous la forme S(p)=H(p) E(p)⋅
En ordonnant les deux polynômes suivant les puissances croissantes de p, on obtient l’écriture suivante,
encore appelée forme canonique de la fonction de transfert :
Bloc
+-
Sommateur Lien point de derivation
Asservissement Cours
Lycée Henri Poincaré Page 6 sur 16
1
1
1 ...
1...
bp S(p) K
H(p)= =
E
(p) p a p
α
′
++
′
++
On définit :
Les pôles : les racines du dénominateur
Les zéros : les racines du numérateur
α classe du système : si α≠0 alors p=0 est un pôle du dénominateur. On dit que le système
comporte α intégrateurs.
K gain
Opérations sur les schémas blocs
Transmittances en série
≡
Structure en boucle fermée
≡
Fonction de transfert en boucle fermée
() ()
() () 1 () ()
Sp Fp
FTBF p Ep Gp Fp
==
+×
Afin de déterminer les fonctions de transferts en chaîne directe et en boucle ouverte, la boucle de retour est
coupé.
Fonction de transfert en boucle ouverte :
()
() () ()
()
ε
==×
Mp
FTBO p F p G p
p
Remarque : Le système bouclé peut être transformé en un système à retour unitaire
Système bouclé à retour unitaire
REPONSE TEMPORELLE DES SYSTEMES DU PREMIER ET DU SECOND ORDRE.
Système du 1ier ordre
Définition
Un système du premier ordre est un système où la relation entre l'entrée et la sortie peut se mettre sous la
forme d'une équation différentielle du premier ordre :
K.e(t)(t)s.s(t) =τ+ &
K est le gain statique, τ est la constante de temps du système.
H1(p) H2(p) H3(p) S(p)E(p) H1(p) H2(p) H3(p) S(p)E(p)
1()Gp () ()
F
pGp×
S(p)E(p) H(p)
1 + H(p) G(p)
()
1()()
Fp
Gp Fp+×
H(p)
G(p)
S(p)E(p) +
–
M(p)
F(p)
()
ε
p

Asservissement Cours
Lycée Henri Poincaré Page 7 sur 16
La fonction de transfert de ce système est donc : .p1
K
E(p)
S(p)
H(p) τ+
==
Réponses temporelles aux signaux tests
Réponse indicielle : 0
() ()et eut=
Réponse temporelle :
La transformée de LAPLACE de e(t)
est égale à E(p) = 0
e
p
.
La sortie du processus est donc égale
à :
S(p) = 0
(1 )
Ke
p
p
τ
+.
En décomposant en éléments simples,
on obtient :
0
11
() 1
()
Sp Ke p
p
τ
⎛⎞
⎜⎟
=−
⎜⎟
⎜⎟
+
⎝⎠
En déterminant la fonction originale de S(p), on en déduit la réponse indicielle d'un système du premier
ordre :
()
0
s(t) K .e . 1 e . ( )
tut
τ
−
=−
Propriétés remarquables :
• La valeur à convergence vaut :
(
)
0
lim .
tst Ke
→∞
=
• Le temps de réponse à 5% est obtenu pour un temps 3t
τ
= :
()
0
3 0,95. .sKe
τ
=
• Pour le temps t
τ
=
, on obtient :
()
0
0,63. .sKe
τ
=
• La pente à l’origine vaut
0
.Ke
τ
Système du 2nd ordre
Définition
L’équation différentielle d’un second ordre est de la forme :
22
00 0
s(t) 2 . . . s(t) . s(t) K . . e(t)
ξω ω ω
++=
&& &
K : gain statique, ξ : coefficient d'amortissement,
ω0 : pulsation propre non amortie du système.
La fonction de transfert s'écrit donc : 2
2
00
K
H(p) 2. .p p
1
ξ
ω
ω
=
++
Asservissement Cours
Lycée Henri Poincaré Page 8 sur 16
Pour déterminer la sortie d'un système du second ordre, il faut distinguer trois cas en fonction de la nature
des pôles de H(p) (
()
2
2
0
41
ζ
ω
Δ= − ). H(p) possède :
deux pôles complexes conjugués (ξ<1), on dira que l'on est en régime pseudopériodique.
deux pôles réels distincts (ξ>1), on dira alors que l'on est en régime apériodique,
un pôle double (ξ=1), on dira que l'on est en régime apériodique critique,
Réponse indicielle : 0
() ()et eut=
Régime pseudopériodique (0 < ξ < 1)
s(t) = K e0 [1 – e–ω0ξt (cos( 1 – ξ2 ω0 t) – 2
1
ξ
ξ
− sin( 1 – ξ2 ω0 t))]u(t)
Propriétés remarquables :
La tangente à l’origine est horizontale. La valeur à convergence permet d’identifier le gain statique K. Le
dépassement D1 permet d’identifier le coefficient d’amortissement
ζ
tandis que temps de dépassement t1
permet d’identifier la pulsation non amortie 0
ω
.
Temps du kème dépassement 2
0
.
1
kk
t
π
ω
ζ
=−
Amplitude du kème dépassement 2
1
0
..exp
k
k
DKe
πζ
ζ
⎛⎞
−
⎜⎟
⎜⎟
−
⎝⎠
=
Pseudo pulsation 2
01
p
ω
ω
ζ
=−
Pseudo période 2
0
22
1
p
T
π
π
ω
ωζ
== −

Asservissement Cours
Lycée Henri Poincaré Page 9 sur 16
Régime apériodique critique (ξ =1)
Propriétés :
Pente à l’origine nulle,
aucun dépassement.
Régime apériodique (ξ >1)
La transmittance H(p) s'écrit donc sous la forme :
2
0
() 11
12
K
Hp pp
TT
ω
=⎛⎞⎛ ⎞
++
⎜⎟⎜ ⎟
⎝⎠⎝ ⎠
s(t) = K e0 [1 – 1
2 (1 + a) e– t/T1 – 1
2 (1–a) e– t/T2]u(t)
Plusieurs cas sont à examiner suivant la valeur
des racines T1 et T2.
Par exemple si T2 ≈ 100 T1, on obtient : ω0
=
1
1
10T ⇒ ξ ≈ 5,05
Par contre un amortissement
ξ = 1,01 correspond à un rapport des racines T2
T1
= 1,04
Propriétés : Lorsque les deux constantes de temps T1 et T2 sont très différentes (rapport de l’ordre de 3)
alors le système peut être assimilé à un premier ordre de constante de temps T2 éventuellement retardé de
T1.
Influence des paramètres caractéristiques 0et
ωζ
ξ = 1
K = 1
e = 4.5
0
0.t
00
s(t) K.e .{1 (1 .t).e } . u(t)
ω
ω
−
=−+
K = 1
e = 4.5
0
ξ = 1.01
ξ = 1.5 ξ = 3
ξ = 5
Asservissement Cours
Lycée Henri Poincaré Page 10 sur 16
La réponse temporelle présente des dépassements pour 1
ζ
> (pseudo périodique). Les courbes en gras
représentent les cas particuliers suivants :
• 1
ζ
= réponse apériodique critique
• 0, 7
ζ
≈ réponse optimisant le temps de réponse à 5 %(le premier dépassement vaut 1,05.K.e0)
La pulsation
ω
ne modifie pas l’amplitude des dépassements.
Amortissement optimal
Le coefficient d'amortissement est dit optimal si le premier maximum est lui même dans la bande des ±5%.
Dans la pratique on utilise la valeur 0.7 comme coefficient d'amortissement optimal.
Abaque du temps de réponse Abaque du dépassement
REPONSE FREQUENTIELLE DES SYSTEMES DU PREMIER ET DU SECOND
ORDRE.
DEFINITION
L'analyse harmonique d’un système consiste
à le soumettre à une entrée sinusoïdale et à
étudier sa sortie en régime permanent en
fonction de la pulsation du signal d’entrée.
Considérons un système linéaire soumis à
une entrée sinusoïdale :
e(t) = e0 sin(ωt)
On montre qu’après extinction du régime
transitoire, la réponse s(t) est sinusoïdale de
même pulsation, mais avec une amplitude sω
et une phase φω fonctions de la pulsation :
s(t) = sω sin(ωt + ϕω )
Pour chaque valeur de ω, on va définir les
deux quantités suivantes :
le gain
0
Gs
e
ω
ω
=
la phase ϕω
On caractérise ainsi l’évolution du gain et de la phase en fonction de la pulsation.
FONCTION DE TRANSFERT EN REGIME HARMONIQUE
t
e(t) s(t)
Déphasage
 6
7
8
6
7
8
1
/
8
100%