Exercice Identification et Contrôle de Processus

TD N 2 Schéma TI et Identification
Exercice N01
On s’intéresse à la mesure du niveau hdans une cuve ouverte. Le débit d’entrée Qeest contrôlé par
une vanne positionnée LV, commandée par un signal U. Le débit de sortie Qsest contrôlé grâce à
une vanne manuelle HV. La mesure Y(en %) du niveau est délivrée par un transmetteur LT. Le
transmetteur est réglé avec une étendue de mesure de 200 cm.
1. Faire un schéma TI de l’installation et préciser le régulateur de niveau, ainsi
que les signaux W,Y,Uet Z.
2. Le procédé étant stabilisé en boucle ouverte à son point de fonctionnement (U= 30 %, Z=
30 %, h=114 cm), on applique un échelon de commande ∆U = 20 %. On enregistre
l’évolution du niveau dans la cuve suite à cet essai :
Essai en BO : Echelon de commande
3. Caractériser le procédé : Le procédé est il stable en BO ? Réaliser l’identification du
procédé à un modèle du premier ordre. En déduire la fonction de transfert réglante Gc(s) du
procédé en BO.
Le procédé étant stabilisé en boucle ouverte à son point de fonctionnement (U = 30 %, Z= 30 %,
h=114 cm), on effectue un échelon de perturbation ∆Z = 20 %. On enregistre l’évolution du niveau
dans la cuve suite à cet essai:
Essai en BO : Echelon de perturbation
4. Réaliser l’identification du procédé à un modèle du premier ordre. En déduire la fonction de
transfert perturbatrice Gz(s) du procédé en BO.

TD N 2 Schéma TI et Identification
Solution
1. Schéma TI de l’installation
2. Le système du premier ordre, naturellement stable en BO (entrée bornée sortie bornée).
3. Identification par un système du premier ordre pour un échelon de commande de 20%.
s
K
sGC
1
%20%???
)%( )%(
0
0
uu yy
U
Y
K
Y
=0
yy
=51 et ???%
Y
On a l’étendue de mesure de la hauteur h=200 cm.
%51
%100200
Ycm
cm
%5.25
200
51100
%
y
275.1
%20 %5.25
0
0
uu yy
U
Y
K
La constante du temps d’un système du premier ordre correspond le temps pour atteindre 63% de
la valeur finale de y.
On a
Y
=51 cm
%63
%10051
ycm
cm
cmycm 13.32
100 6351
La valeur réelle de la hauteur égale 114+32.13=146.13 cm
A partir de la courbe,le temps correspond cette valeur est
sec5.7
Donc
s
sGC171 275.1
4.
Identification par un système du premier ordre pour un échelon de perturbation de 20%.
U
Y
QS
Qe
W
h

TD N 2 Schéma TI et Identification
s
K
sGZ
1
%20 %???
)%( )%(
0
0
ZZ yy
Z
Y
K
Y
=0
yy
=65-114=-49 et ???%
Y
On a l’étendue de mesure de la hauteur h=200 cm.
%49
%100200
Ycm
cm
%5.24
200 49100
%
y
225.1
%20 %5.24
0
0
zz yy
U
Y
K
La constante du temps d’un système du premier ordre correspond le temps pour atteindre 63% de
la valeur finale de y.
On a
Y
=49 cm
%63
%10049
ycm
cm
cmycm 87.30
100 6349
La valeur réelle de la hauteur égale 114-30.87=83.13cm
A partir de la courbe,le temps correspond cette valeur est
sec17
Donc
s
sGZ5.71 225.1
Remarque
on a constaté que : G
Z
(s) est en sens inverse c.-à-d. l’augmentation de la perturbation
provoque la diminution de la mesure
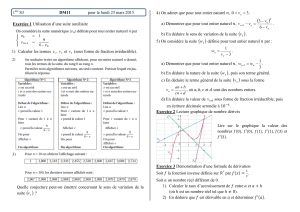
ExerciceN02
Soit, ci dessous, la réponse x(t) d'un système à un échelon d'entrée y(t) de 1%.
1. Déterminer graphiquement (le plus précisément possible) le premier dépassement D1et la
pseudo période TP.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 15
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8 Réponse Indicielle
Step Response
Time (sec)
Amplitude

TD N 2 Schéma TI et Identification
2. En déduire le gain statique K, le coefficient d'amortissement
et la pulsation propre (naturelle)
wndu système. On utilisera les formules qui figurent dans le cours.
3. En déduire la fonction du transfert G (s) du système.
Solution:
05.0 5.076.0
0
1
1
yy
yty
DD
On a
ݐ(ܦଵ) = 1.6 ݏ݁ܿ,݁ݐݐ(ܦଶ) = 4.8 sec
ܶ=ݐ(ܦଶ) − ݐ(ܦଶ)= 4.8 − 1.6 = 3.2 ݏ݁ܿ
Calcul du Gain statique K
5.0
01 05.0
0
0
xx yy
X
Y
K
Calcul du coefficient d’amortissement ࣈ
ܦଵ% = ݁ିగ.క
ඥଵିకమ
ܦଵ% = 100 × 0.24
0.5 = 48%
ܦଵ% = ݁ିగ.క
ඥଵିకమ⇒ln (ܦଵ%) = ln (݁ିగ.క
ඥଵିకమ⇒ln(ܦଵ%)=−ߨ.ߦ
ඥ1 − ߦଶ
ln(ܦଵ%)=−ߨ.ߦ
ඥ1 − ߦଶ⇒ln(ܦଵ%)ඥ1 − ߦଶ= −ߨ.ߦ֜
(ln(ܦଵ%)ඥ1 − ߦଶ)ଶ= (−ߨ.ߦ)ଶ=ߨଶ.ߦଶ⇒
ln(ܦଵ%)ଶ(1 − ߦଶ)=ߨଶ.ߦଶ
ܦଵ% = 48 ⇒ln(ܦଵ%)= ln ൬48
100൰= −0.73
(−0.73)ଶ(1 − ߦଶ)=ߨଶ.ߦଶ⇒0.53(1 − ߦଶ)=ߨଶ.ߦଶ
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 15
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
0.55
0.6
0.65
0.7
0.75
0.8 Réponse Indicielle
Step Response
Time (sec)
Amplitude
Tp
D1

TD N 2 Schéma TI et Identification
0.476 = 0.53ߦଶ+ߨଶ.ߦଶ= (3.14)ଶߦଶ+ 0.53ߦଶ= 10.85ߦଶ⇒
ߦ=ඨ0.53
10.85 ≈ 0.22
Calculde
wn
2
1
2
p
nT
w
06.2
95.02.3 28.6
)22.0(12.3
214.3
1
2
22
p
nT
w=
488.02
4222.02 45.0
2
)( 2222
2
sssswsws kw
sG
nn
n
Exercicen03
A partir de la réponse indicielle (voir ci-dessous) d'un procédé industriel, dont
le signal de commande (ou signal réglant) subit une variation en échelon
∆
X
unitaire, on se propose de modéliser la fonction de transfert
G(s)
de ce procédé.
1.
Calculer legainstatiqueK
2.
Déterminer les paramètres du
modèle de Broïda
. En déduire l'expression de G(s) ainsi
modélisée.
3.
Déterminer les paramètres du
modèle de Strejc
. En déduire la nouvelle expression de G(s)
modélisée.
Solution:
Model debroïda
CalculdugainStatique:
A partir de la figure on peut facilementextraire ΔY = 12-0=12
T
2
correspond 40% de la valeur finale de You bien ΔY.
A partir de la figure on peut facilementextraire ΔY = 12-0=12
De la même manière on trouve :
8.4
100
4012
%40
y
%
28
%10012
Y
6.3
100
2812
%28
y
12
1
12
X
Y
k
 6
7
6
7
1
/
7
100%