Conjugaison topologique des sous

Caractérisation combinatoire de la conjugaison
topologique entre décalages de type fini
Ramón Eduardo Ronzón Lavié
19 janvier 2015
1 Objectif principal
Dans ce texte on présente un résumé d’une partie de la théorie des décalages de type
fini : on présentera une caractérisation, en termes de graphes de division, de la conjugaison
topologique entre décalages de type fini, à renouvellement de nomination d’arêtes près.
Table des matières
1 Objectif principal 1
Table des matières 1
2 Introduction 2
3 Graphes 3
4 Décalages 6
Bibliographie 12
1

2 Introduction
Dans ce texte on exposera des outils pour énoncer le théorème de classification des
décalages de type fini, une classe des systèmes dynamiques bien importante. Un des pre-
miers motivations pour étudier ce type de dynamique émerge quand Jacques Hadamard
appliqua l’idée de faire une partition d’une surface (dans laquelle en une quantité finie des
régions, associer un symbole à chaque région, et après étudier la dynamique du décalage,
laquelle est donnée par la dynamique du . [1]
La dynamique symbolique s’est constitue comme une branche des mathématiques très
importante et influent dans les systèmes dynamiques, mais aussi dans l’algèbre linéaire
et dans l’informatique, voir [2]. La majeure partie de ce texte est basée sur la dernière
référence. Ce texte est rentré autour des décalages de type fini.
Ces systèmes se décrivant par des graphes, on commence en présentant une petite
partie de la théorie des graphes. Après, on donne des définitions, et leur lemmes de
la dynamique symbolique : décalage, codage, décalage par blocs, graphe et graphe de
division. On associe à chaque graphe une dynamique de type fini ; plus tard, on verra
une réciproque. Ultérieurement, on va montrer qu’on peut changer l’« alphabet » d’un
graphe pour réduire la fenêtre de tout codage, et en plus, ce changement peut être décrit
en termes des graphes de division. Finalement on va montrer qu’on peut faire le même
pour l’inverse sans affecter la fenêtre du codage original, pour le décrire à renouvellement
de nomination ( d’arêtes ) près.
2

3 Graphes
Définition (Graphe).- Soient V,Edeux ensembles finis, et i, t :E −→ V deux fonctions.
On appelle le quadruplet G:= (V,E, i, t)un graphe. On dit que les éléments de Vet E
sont les sommets et arêtes de G, respectivement. Si e∈ E on dit que i(e)est la source de
e, et t(e)est le but de e.
Notation: On note Ep:= {e∈ E :i(e) = p}et Ep:= {e∈ E :t(e) = p}. Les éléments de
ces ensembles seront appelés arêtes sortantes de p et arrivantes à p respectivement. On
note V(G)et E(G)comme les ensembles des sommets et arêtes de G, respectivement.
Définition (Graphe transposé).- Soit G:= (V,E, i, t)un graphe. On définit le graphe
transposé de Gcomme >G:= (V,E,>i, >t), où >i:= t, et >t:= i.
Remarque 3.1.- Soit G= (V,E, i, t)un graphe et p, q ∈G. Notons que Ep=E(>G)p
et Eq=E(>G)q, donc E(>G)p
q=Eq
p. D’où on obtient A>G=>A.
Définition (Sommet coincé).- Soient Gun graphe, un sommet p∈ V(G)est dit coincé
s’il n’existe aucune arête qui parte de ou arrive à p.
Remarque 3.2.- Un sommet est coincé si et seulement si la colonne ou la ligne associé
àpdans la matrice d’adjacence est composée uniquement de zéros.
Définition (Graphe essentiel).- Un graphe est dit essentiel si aucun sommet n’est coincé.
Le théorème principal de ce texte est énoncé en termes des graphes de division sor-
tante :
Définition (Graphe de division sortante).- Soit Gun graphe. On note V:= V(G)et
E:= E(G). Pour chaque sommet p∈ V on considère une partition Pp:= {Ek
p}m(p)
k=1 de Ep
telle que tous les Ek
psont non-vides. Soit P:= {Ek
p:p∈ V, k ∈ {1, . . . , m(p)}} la partition
de Einduite par les Ek
p. Le graphe de division (sortante) de sommets G[P]induit par P
est G0:= (V0,E0, i0, t0), où
V0:= {vk:= (v, k)∈ V × N:k∈ {1,...m(p)}},
E0:= {ej:= (e, j)∈ E × N:j∈ {1,...m(t(e))}}.
On sait que pour tout e∈ E il existe un unique k∈ {1, . . . , m(i(e))}tel que e∈ Ek
i(e), ce
qui nous permet définir i0, t0:E0−→ V0par i0(ej) := i(e)ket t0(ej) := t(e)j.
On appellera graphe de division totale, le graphe de division que satisfait que pour
tout p∈G,m(p) = |Ep|.
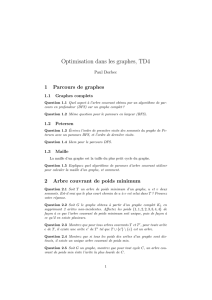
Pour mieux comprendre cette construction on donne quelques exemples :
3

4

Remarque 3.3.- On peut se demander pourquoi on exclut le cas ou il existe un ktel que
Ek
p=∅, le motif principal est que le graphe construit en utilisant le processus précédent
n’est pas essentiel.
De manière similaire on définit le graphe induit par division entrante :
Définition (Graphe de division entrante).- Soit Gun graphe, on note V:= V(G)et
E:= E(G). Pour chaque sommet p∈ V on considère une partition Pp:= {Ep
k}m(p)
k=1 de Ep
telle que tous les Ep
ksont non-vides. Soit P:= {Ep
k:p∈ V, k ∈ {1, . . . , m(p)}} la partition
de Einduite par les Ep
k. Le graphe de division (entrante) de sommets G[P]induit par P
est G0:= (V0,E0, i0, t0), où
V0:= {vk:= (v, k)∈ V × N:k∈ {1,...m(p)}},
E0:= {ej:= (e, j)∈ E × N:j∈ {1,...m(i(e))}}.
On sait que pour tout e∈ E il existe un unique k∈ {1,...,Et(e)}e∈ Et(e)
k, ce qui nous
permet de définir i0, t0:E0−→ V0par i0(ej) := pjet t0(ej) := qk.
Proposition 3.1.- Soient G= (V,E, i, t)un graphe, Pune partition d’arêtes entrantes,
et H1:= >G= (V,E, i1, t1). Par construction du graphe transposé on a que Pdéfinit
une unique partition d’arêtes sortantes de H1. On définit H2:= H[P]
1= (V0,E0, i2, t2).
Alors, G[P]=>H2.
Démonstration. Comme les m(p)des partitions sont égaux tout ce qu’il reste à trouver est
la correspondance bijective entre les arêtes. Soient inet tnles applications correspondants
aux Hn. Soit ej∈H2, on sait qu’il existe un unique ktel que ej∈ Ek
i2(ej). Rappelons que
E(H2) = E(>H2), et notons que
>i2(ej) = t2(ej) = t1(e)j=i(e)j,
>t2(ej) = i2(ej) = i1(e)k=t(e)k.
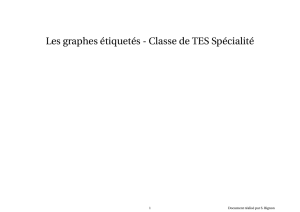
Définition (Amalgame).- Soient Get Hdeux graphes. Si Hest un graphe de division
entrante de Gon dit que Gest un graphe d’amalgame aux entrants de H. D’une fa-
çon analogue on définit les graphes d’amalgame aux sortants. S’il n’y pas du risque de
confusion on dit que Hest un graphe de division de G.
5
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%