architecture d`un syst de mesure auto(support,protocol)

1
Sommaire
Introduction :
1-Architectures d'automatismes industriels……………………………………(2)
2-Architectures d'automatismes, des évolutions progressives………………. (2)
3-Transmission de données………………………………………………………(2)
3-1) Introduction…………………………………………………………………...(2)
3-2) Le terme support de transmission……………………………………………. (2)
I. 4- les supports de transmission ………………………………………..…(3)
4-1) Capteur-transmetteur ……………………………………………………..…... (3)
4-1-2) Transmetteur…………………………………………………………...……. (5)
4-1-3) Signaux utilisés………………………………………………………...……. (7)
5-Les trois types de transmetteur……………………………………….………. (10)
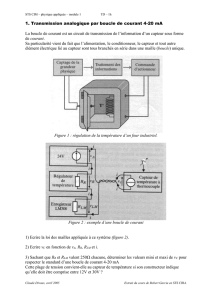
6-La boucle de courant 4-20 mA………………………………………………...(10)
6-1) But de la boucle……………………………………………………………(10)
6-2) Comment est réalisé la boucle 4-20 mA ……………………………..(11)
6-3-1) L'émetteur………………………………………………………………. (12)
6-3-2) L'alimentation………………………………………………………..…. (12)
6-3-3) Les fils de la boucle ………………………………………….....................(12)
6-3-4) Le récepteur……………………………………………………………..(12)
6-3-5) Installation et test de la boucle…………………………………………. (12)
7-Astuce de calcul…………………………………………………………………(13)
8-Exemple …………………………………………………………………………(13)
9-Transmission sur supports filaires en cuivre……………………………….....(14)
9-1) Paire torsadée (STP et UTP)…………………………………………………...(15)
9-2) Supports bifilaires (symétriques)……………………………………………..(15)
9-2-1) Support coaxial………………………………………………………………(15)
9-2-2) Transmission par fibre optique……………………………………………(16)
II. Protocole :………………………………………………………………….(17)
1-Définition………………………………………………………………………...(17)
2- Signal de communication HART……………………………………………...(18)
3- exemple des protocoles………………………………………………………....(19)
4- schéma sur les diffèrent protocole……………………………………………..(22)
Conclusion

2
Introduction
La modélisation et la représentation de l’architecture logicielle des systèmes complexes
sont devenues, aujourd’hui, une phase importante de leurs processus de développement
(Bertolino et al. 2005). L’architecture d’un système décrit sa structure à un haut niveau
d’abstraction, en termes de composants et de connecteurs. Cette abstraction offre de
nombreux avantages tout au long du cycle de vie du logiciel
(Shaw et al. 1996). En effet, disposer d’une représentation de l’architecture facilite les
échanges entre les concepteurs et les programmeurs. Ensuite, pendant les phases de
maintenance et d’évolution, cette représentation permet de localiser les défauts du
logiciel et réduit les risques lors de l’ajout d’une nouvelle fonctionnalité. En plus, une
architecture à base de composants offre d’autres avantages. En effet, en utilisant cette
représentation, la distinction entre les composants et les connecteurs rend explicite la
séparation entre les aspects métiers et communications et facilite la compréhension et
l’évolution du système. L’architecture à base de composants est également essentielle
pour faciliter la réutilisation de certaines parties du système représentées par les
composants.
Cependant, force est de constater, que beaucoup de systèmes existants ne disposent pas
d’une représentation fidèle de leur architecture. En effet, le système peut avoir été conçu
sans considérer la notion d’architecture, comme dans le cas de certains systèmes
patrimoniaux. Pour d’autres systèmes, la représentation disponible peut être décalée par
rapport à l’implémentation du système. Ce décalage apparaît avec les écarts entre
l’architecture prévue et implémentée puis s’accroît avec le manque de synchronisation
entre la documentation et l’implémentation.

3
1-Architectures d'automatismes industriels : évolutions et grandes
tendances
Ces vingt dernières années, les architectures d’automatismes ont très fortement évolué.
Ce phénomène s’amplifie avec l’arrivée des nouvelles technologies de l’information et de
la communication (NTIC).
Ces changements successifs sont dus, d’une part, à l’évolution des besoins des
utilisateurs, et d’autre part au développement des technologies.
Par utilisateurs, il faut entendre tous les intervenants : architectes réseaux, intégrateurs,
metteurs en œuvre, exploitants, équipes de maintenance, etc.
2-Architectures d'automatismes, des évolutions progressives
Depuis que les automatismes sont réalisés sur la base d’unités de traitement (automates
programmables), les architectures ont fortement évolué et sont passées par différents
stades pour arriver aux architectures actuelles, basées sur l’adoption des grands standards
de communication.
3-Transmission de données
3-1) Introduction :
La transmission de données entre un émetteur et un récepteur suppose que soit établie une
liaison sur un support de transmission (appelée aussi voie de transmission ou canal)
munie d’équipement de transmission à ses extrémités.
Émetteur et récepteur sont désignes communément par les termes ETTD (Equipement
Terminal de Traitement de Données) ou DTE en anglais (Data Terminal Equipement)
terme normalisé désignant un équipement informatique connecté à un canal de
transmission (ça peut être un ordinateur, un terminal ou autres).
3-2) Le terme support de transmission :
Désigne le support physique qui permet de transporter les informations d’un appareil à
un autre, il peut y’avoir différents types de supports de transmission de nature très
divers : Transmetteur, ligne téléphonique, câble coaxial, fibre optique, atmosphère et
autres. Ces moyens de transmission ont des caractéristiques spécifiques et impliquent des
contraintes à leur utilisation que nous rappelons brièvement.

4
4-Les supports de transmission :
4-1) Capteur-transmetteur :
4-1-1) Capteur :
Définition et constitution
Le capteur est l’élément primaire sensible au phénomène physique qui le traduit en une
grandeur exploitable généralement électrique. Il est le premier élément de la chaîne de
mesurage.
Lorsque le capteur est constitué de plusieurs éléments, le corps d’épreuve est celui en
contact direct avec le mesurande.
Il génère une grandeur physique intermédiaire (déplacement, déformation, force…)
traduite en une grandeur électrique (tension, capacité, induction…) par le transducteur
.
En pratique, les termes capteur et transducteur désignent le même constituant, traduit en
anglais par les mots sensor et transducer.
Capteur passif :
Le capteur est passif lorsque la grandeur électrique exploitable est une impédance à
dominante capacitive, inductive ou résistive. C’est un dipôle passif : l’impédance d’un
capteur passif n’est mesurable qu’avec un conditionneur électronique associé.
Exemple : jauge de contrainte résistive :
Une jauge de contrainte résistive (transducteur) est collée sur l’extérieur d’un tube. Sous
l’influence d’une variation de pression, la jauge subite une déformation identique au tube
(corps d’épreuve), et sa résistance ohmique varie.

5
Capteur actif :
Le capteur est actif lorsque, soumis au mesurande, il se comporte en générateur
électrique : générateur de charge, de courant, ou de force électromotrice.
Le signal généré est faible : pour une variation de
100 °C, la f.é.m d’un thermocouple type K varie de 4mv
Exemple : capteur générateur de charge
L’effet piézoélectrique du quartz traduit l’apparition de charges superficielles sur les
faces opposées d’une lame soumise à une force. Cet effet est réversible.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%