Prof. Mourad ZEGRARI

Prof. Mourad ZEGRARI

© M. ZEGRARI 2
Machines
Synchrones
Plan
Principe.
Constitution.
Bobinage des enroulements.
Production de la force électromotrice.
Alternateur Synchrone à Pôles Lisses.
Alternateur Synchrone à Pôles Saillants.
Couplage de l’alternateur au réseau.
Moteur Synchrone.

© M. ZEGRARI 3
Machines
Synchrones
Plan
Principe
Constitution
Bobinage
Production de la f.é.m.
Alternateur Synchrone
Moteur Synchrone
B
C
D
F
A
E
Couplage de l’alternateur au réseau

© M. ZEGRARI 4
Machines
Synchrones
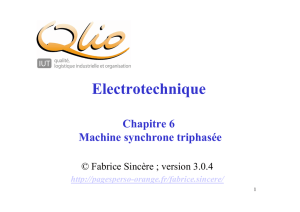
Présentation
Convertisseur électromécanique réversible :
Alternateur : production de l’énergie électrique (Centrales électriques)
Moteur Synchrone : entraînement électromécanique, production de
l’énergie réactive (compensateur synchrone).
Machine
Synchrone
Energie
Electrique Energie
Mécanique
Moteur
Alternateur

© M. ZEGRARI 5
Machines
Synchrones
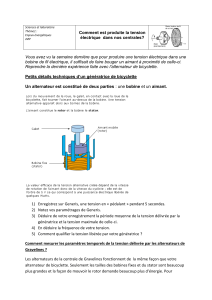
Principe : Génératrice Synchrone
Un système inducteur (aimant) tournant à la vitesse Ω
s
, crée dans une
armature triphasée, trois tensions induites triphasées équilibrées, de
valeur efficace et de pulsation ω
s
telle que :
ω
φ
Avec : ω
s
= Ω
s
: nombre de paires de pôles.
φ
: flux efficace sous un pôle.
Le système inducteur peut être :
Un aimant permanent.
Un électro-aimant.
A
B
C
(a)
(b)
(c)
Ω
s
N
S
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
1
/
74
100%