~, - 1/9 - y - ~4.J3\ ~#I ~

~,
1/9
C : RR44
3:J.olaA.11
3: j~~1 ô~
u..»~ ~.".J\ ~.j31 ùL:l..l.a'i1
2009 A..p1.)Jl..,~\ o.)JJ.!\
~4-~\~~ (,#1 " ,..
"';;;'1..i~"i\J ~.~ ~~\ j.S~1
Ù"'.I.if.oJ\ ('~
-
-
-y - ~4.J3\ ~#I ~
:.~L JI
: & JI -(ô)~1

~I
2/9 -'4S1.J~j'1 o').JJ.!\- 200.9 4.).;3~ ~~\ ~.;J\ ùWA~1t~.JA! '44-'i' ~\S
-~- ~4.J3\ ~.;kJ1~: ~I .JI (o)~1 '(jo"~\ ~~ : oJl4
Document réponse DR 1
111. Exprimerlebesoindusystèmedans lecasgénéraldJutilisation:
1Aqui rend-il service? 11Surquoi agit-il?
1Dans quel but?
Transférer un lot d'objets d'un endroit à un autre.
. . . . . . . . . . . . . . . . . . .. . . . . . . . . . .. . . . .. . .. .. . . . . . . . . . . . .. . . . . .. . . . . . . . . . . . . . ..
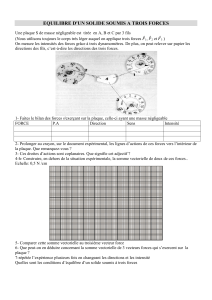
121. Compléter ce diagramme ainsi que le tableau de définition des fonctions de
service correspondant.
Utilisateur
Machine de
conditionnement ~Fc2 Fc3
Fc5

~I
3/9 -~I.J~~I °.J.JJ.!\- 2009 4.J~ ~.J4l1 ~.;J\ ùb:i.4'i1t~.JA! ~4-'i1 ~\S.
- 1.:01-~4J.1\ ~.;Ja.J\~: ~I .Ji (o)~\ ,U"'~I ~~ : oJI..4
Document réponse DR 2
la listede définitiondes fonctions de service:
Fp : permettre à l'utilisateur de transférer sur une machine de conditionnement, un objet ou un lot
d'objets automatiquement.
Fc1: Se monter sur la machine de conditionnement.
FC2:...s'adapter au réseau de l'énergie électrique......
Fc3:être raccordé à une source d'énergie pneumatique.
Fc4:être adapté au lot à déplacer en forme, au poids et en encombrement.
FcS:s'adapter à l'environnement
Fc6: assurer la sécurité de l'utilisateur
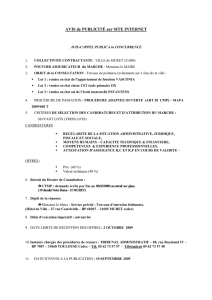
121. Identifier les éléments constituant le système de transfert sur le schéma
cinématique suivant:
Courroie crantée
Vérin double effet
Glissiere de guidage horizontal
Poulie libre
Glissiere de guidage vertical
Rotule de la tête du vérin
Plaque de poussée
1Lotàdéplacer~
WJl "'"

~I
4/9 -'4S1..;J:i...,'i1o";J.lJ1-2009 ~J,:",yJl~.j31 ù~':l\ t~yJ ~~"il ~~
-~- ~l,uJ1 .a~\ ~:.m J\ JÎ (o)~1 ',->",~I .a~ : oJL.
Document réponse DR 3
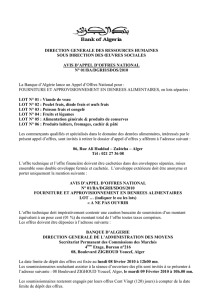
122. Compléter le diagramme FAST descriptif, par les solutions constructives
relatives aux différentes fonctions teclmiques:
123. Compléter le tableau suivant par les noms des liaisons et les degrés de liberté
permis (Tx, Ty, Tz, Rx, Ry , Rz) .
r-- Guider la plaque en Glissièredeguidage
translation verticale vertical
Descendre la plaque
.---- 1---
de poussée '-- Entrainer la plaque Vérin double effet
verticalement
Fp :Translater un f-
objet ou un lot -Guider la plaque en Glissièredeguidage
d'objets translation horizontale horizontal
-Translaterla plaque 1---
horizontalement -Entrainer la plaque Courroie crantée
horizontalement
Liaisons Pièces en liaison Type de liaison Degrés de liberté
Pivot Ry
LI Châssis / poulie
libre
Tige du vérin / rotule Rx Ry Rz
L2 support de la
plaque
Corps du vérin / Rx
L3 coulisseau de la Pivot
glissière
horizontale
Tige du vérin / Pivot glissant Rz Tz
L4 corps du vérin

Acquérir
Capteurs de fin de course
Capteur de présence du lot
Alimenter en air
comprimé Distribuer
Distributeur à
commande électrique
Alimenter en
électricité Distribuer
Contacteur electique
Traiter
Automate
programmable
Convertir
Vérin pneumatique
Convertir
Moteur e1ectrique
1voyant 1
1 ~
Communiquer
Câbles electriques
Transmettre
1roMe 1
>-c
..........
PJ
...c
~
(D
p..
(D
'"d
0
~
CI)
CI)
(lh
(D
Transmettre
Reducteur
Système poulie-courroie
1:;
0
t")
=
e
t'D
=
.....
"'f
t'D-
"0
0
=
~
~t'D
~I:;
VI a.' )o"!""I
0 m- ~
-n
~O()~
-. 3 0
g"C 3
n~"C
0-. m-
::J ~ ~
~0 ....
::J -
C m m
!4. ::J a.
<' n Qi'
m ::r (JQ
QI ~) QJ
~~3
~a. 3
~m: m
r+::J"C
n m m
::r ....
QI 0.9. 3
n m m
C m r+
::J r+ or
m n ::J
a.::rr+
m~) a.
VI ::J -":
-ma.
0a. m
::J _::J
n -. r+
r+ ::J -.
o' - ::!7
0 m
....
VI 3 -
(JQ QI m
m- r+ VI
::J -.-<
0 VI
::J r+
~. m'
...c m 3
C r+
m n m
VI m VI
, m
m -
::J 0
-. ::J
::J -
a. QI
...c
C
QI
::J
r+
QI
~E'
l
't:
1 -
.[ ~
1 t'
t~~
'&.;;:
(t;
-!;
,. 1
i:~
t'~
[,.t"
"<e..
[-~
-~
~.t.
~~
te:.
~ f.
{~
.;"1.
1rt.
";,.t'
".p
r-.~
1
f;=
 6
7
8
9
6
7
8
9
1
/
9
100%