Cours API: Architecture des Automates Programmables Industriels

Rév.: 03
1
Enseignant: SMAHI Mokhtar
Module: AUTOMATES PROGRAMMABLES INDUSTRIELS "API"
Section :
Cours 02: Architecture des automates programmables Industriels
Nombre des étudiants: 30
Temps: 3h00
But: Compréhension de l'architecture "HARD" des API
Objectifs: permettre aux étudiants de:
Voire connaître l'aspect extérieur des API ;
Prendre une idée la structure interne d'une API ;
Comprendre le traitement du programme dans un API.
Préface
??
I-Aspect extérieur
Les automates peuvent être de type compact ou modulaire.
Compact
On distinguera les modules de programmation (LOGO de SIEMENS, ZELIO de SCHNEIDER,
MILLENIUM de CROUZET ...) des micro automates .
Il intègre le processeur, l'alimentation, les entrées et les sorties. Selon les modèles et les fabricants, il
pourra réaliser certaines fonctions supplémentaires (comptage rapide, E/S analogiques ...) et recevoir des
extensions en nombre limité.
Ces automates, de fonctionnement simple, sont généralement destinés à la commande de petits
automatismes.
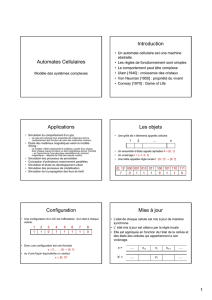
Automates compacts: LOGO de SIEMENS, ZELIO de SCHNEIDER et MILLENIUM de CROUZET

Rév.: 03
2
Eléments d'un automate programmable compact
Modulaire
Le processeur, l'alimentation et les interfaces d'entrées / sorties résident dans des unités séparées
(modules) et sont fixées sur un ou plusieurs racks contenant le "fond de panier" (bus plus connecteurs).
Ces automates sont intégrés dans les automatismes complexes où puissance, capacité de traitement
et flexibilité sont nécessaires.
Automate modulaire SLC 500 de Allen Bradley

Rév.: 03
3
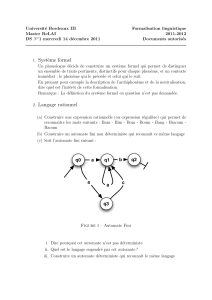
Automate modulaire SIMATIC S7-300 de Siemens
1 Module d'alimentation
2 Pile de sauvegarde
3 Connexion au 24V cc
4 Commutateur de mode (à clé)
5 LED de signalisation d'état et de défauts
6 Carte mémoire
7 Interface multipoint (MPI)
8 Connecteur frontal
9 Volet en face avant
II-Aspect intérieur
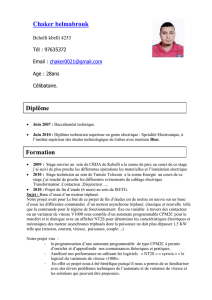
La structure interne d’un automate programmable industriel (API) est assez voisine de celle d’un
système informatique simple.
La structure interne d’un automate programmable industriel (API)
L'unité Centrale CPU

Rév.: 03
4
L'unité centrale est le regroupement du processeur et de la mémoire centrale. Elle réalise toutes les
fonctions logiques, arithmétiques et de traitement numérique (transfert, comptage, temporisation ...). Elle
commande l'interprétation et l'exécution des instructions programme. Les instructions sont effectuées les
unes après les autres, séquencées par une horloge.
Exemple: Si deux actions doivent être simultanées, l'API les traite successivement.
Microprocesseur
Le microprocesseur est connecté aux autres éléments ( mémoires et interfaces entrées sorties) par
des liaisons parallèles appelées bus qui véhiculent les informations sous forme binaire. Il possède également
des liaisons avec l'extérieur pour le dialogue avec l'outil de programmation, raccordement sur terminal ou
sur réseau inter automates.
Une carte processeur moderne set structurée par trois processeurs:
Un micro-processeur standard utilisé pour les fonctionnalités additionnelles (arithmétiques)
Un circuit ASIC (Application Specific Integrated Circuit) pour les traitements purement logiques
Un processeur pour la prise en charge des communications vers la console et les réseaux
informatiques
Carte processeur moderne
Mémoires
Trois types de mémoire cohabitent :
Mémoire du système d'exploitation (ROM ou PROM),
Mémoire du programme (EEPROM)
Mémoire des données lors du fonctionnement (RAM). Elle stock les variables d'entrée (états des
capteurs), les variables de sortie (ordres aux actionneurs), variable Interne (résultats de fonctions,
résultats intermédiaires). Cette dernière est généralement secourue par pile ou batterie.
On peut, en règle générale, augmenter la capacité mémoire par adjonction de barrettes mémoires
type PCMCIA.

Rév.: 03
5
Alimentation
Intégrée ou indépendante de l'automate programmable elle assure la distribution d'énergie aux
différents modules. L'automate est alimenté généralement par le réseau monophasé 230V ; 50 Hz mais
d'autres alimentations sont possibles (110V etc., ... ).
Il est souhaitable d'asservir l'alimentation de l'automate par un circuit de commande spécifique
(contacteur KM1).
Bus interne
Il permet la communication de l'ensemble des blocs de l'automate et des éventuelles extensions.
On constate que:
Les échanges d’informations entre les différents éléments de l’automates (entrées, sorties,
mémoires) transitent toujours par le processeur
A cause du fonctionnement séquentiel, il n’y a jamais qu’un seul élément à la fois en
communication avec le processeur
Il est possible d’utiliser un chemin commun et une procédure commune pour les échanges. Celui-ci
est appelé BUS.
Le BUS est constitué de lignes d’adresse, de lignes de données et de lignes de contrôle
L‘automate programmable adopte ainsi la structure typique d’un ordinateur.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%