Diffraction acoustique par une ou plusieurs plaques : comportement

Diffraction acoustique par une ou plusieurs plaques :
comportement singulier pour des petits nombres de Mach
S. Job, E. Lun´eville et J.-F. Mercier
Laboratoire de Simulation et de Mod´elisation des ph´enom`enes de Propagation,
ENSTA, UMR 2706 du CNRS, Paris, FRANCE
1 Introduction
Nous nous int´eressons `a la diffraction acoustique par une plaque en pr´esence d’un ´ecoulement
de nombre de Mach Mdans un conduit. Le cas avec ´ecoulement n’est pas une simple extension
du cas d’un fluide au repos : lorsque M6= 0, l’interaction entre l’onde acoustique incidente et
l’´ecoulement porteur donne naissance `a un sillage d’amplitude Fderri`ere la plaque. Le com-
portement du sillage lorsque la vitesse de l’´ecoulement diminue devient singulier : oscillations
horizontales de tr`es petites longueurs d’onde et extension verticale tr`es fine. Ce comportement
pose des probl`emes num´eriques (n´ecessit´e d’un maillage tr`es fin pr`es du sillage) et pose des
questions th´eoriques d´elicates sur la convergence du probl`eme de diffraction pour M→0. En
effet ce comportement est surprenant car il n’existe pas de sillage lorsque M= 0.
Dans un premier temps nous allons pr´esenter une m´ethode num´erique fond´ee sur une ap-
proximation par ´el´ements finis permettant d’acc´eder aux variations de Fpour les petites valeurs
de Msans raffiner excessivement le maillage. Puis nous consid´ererons le cas de deux plaques
align´ees, pour lequel il est int´eressant d’´etudier l’interaction entre les sillages issus des plaques.
De plus cette configuration fait apparaˆıtre un nouveau ph´enom`ene : l’incidence d’un sillage sur
le bord d’attaque d’une plaque. Cette interaction pose des probl`emes de mod´elisation d´elicats,
car le sillage ne se contente pas de ”glisser” sur la plaque. Il existe diff´erents mod`eles pour la
condition aux limites sur la plaque avale, et nous avons ´etudi´e l’influence de cette condition sur
le champ diffract´e.
2 Mod´elisation
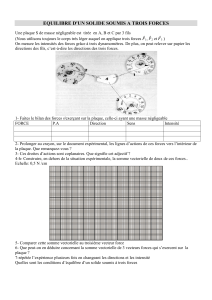
Nous consid´erons un conduit Dde hauteur h`a parois ∂D rigides. Une plaque rigide est
plac´ee en y=ηentre x= 0 et x=L, et le fluide compressible occupant le domaine Ω (conduit
priv´e de la plaque) est anim´e d’une vitesse uniforme U. Une onde acoustique de pulsation ωest
envoy´ee sur la plaque (voir Fig.1).
Derri`ere la plaque prend naissance un sillage S[1, 2, 3] que nous allons maintenant ca-
ract´eriser.
1

guide d’onde
sillage
plaque
y= 0
∂D
ϕinc
x
y=hy
ΩU
ΓS
Fig. 1 – Syst`eme ´etudi´e
2.1 Sillage
Les perturbations de pression pet de vitesse vsatisfont les ´equations d’Euler lin´earis´ees
ρDv
Dt +∇p= 0,
1
c2
Dp
Dt +ρdiv v= 0,
dans Ω\S, o`u D/Dt =−iω +U∂/∂x en r´egime fr´equentiel (d´ependance temporelle en e−iωt). ρ
est la masse volumique du fluide en l’absence de perturbation et cla vitesse du son.
Nous allons `a pr´esent d´eterminer o`u les perturbations sont irrotationnelles. Si U= 0 on
obtient ρiωv=∇p, donc rot v= 0 dans tout le fluide. La situation diff`ere en pr´esence
d’´ecoulement. A partir des ´equations d’Euler on obtient que D(rot v)/Dt = 0. Le rotationnel
de vse conserve donc le long des lignes de courant (la solution g´en´erale est rot v=f(y)eikx/M
o`u fest donn´ee par les conditions en amont de la plaque). Si les perturbations sont suppos´ees
irrotationnelles en amont de la plaque, on obtient rot v= 0 dans tout le fluide sauf derri`ere la
plaque, o`u un sillage prend naissance. Il s’agit d’une all´ee de tourbillons ´emise depuis le bord de
fuite de la plaque `a la fr´equence de l’onde acoustique incidente, et convect´ee par l’´ecoulement
porteur.
Les conditions aux limites naturelles sur le sillage sont [uy]=0=[p] o`u [.] d´esigne le saut
`a travers le sillage et o`u uest la perturbation du d´eplacement du fluide. Remarquons que ces
derni`eres conditions aux limites incitent `a utiliser les variables uou ppour r´esoudre le probl`eme
de diffraction. Il a d’ailleur ´et´e propos´e une m´ethode d’´el´ements finis reposant sur une formulation
mixte d´eplacement-pression [4], mais nous avons pr´ef´er´e utilis´e une inconnue unique.
2.2 Choix de variable
Les conditions aux limites naturelles sur les parois du guide u.n= 0 et la continuit´e du
d´eplacement vertical `a travers la sillage semblent indiquer que la variable la mieux adapt´ee au
probl`eme est le d´eplacement.
2.2.1 Formulation en d´eplacement
Le d´eplacement satisfait l’´equation de Galbrun
D2u
Dt2−∇div u= 0,
dans Ω\S, o`u `a pr´esent on note D/Dt =−ik +M∂/∂x avec k=ω/c et o`u on a introduit le
nombre de Mach M=U/c. Les conditions aux limites sur le sillage, exprim´ees en fonction du
d´eplacement seul, deviennent [uy] = 0 = [divu] (on a p=−ρc2divu).
2

Lorsque U= 0, l’´equation de Galbrun peut ˆetre r´esolue par deux m´ethodes `a base d’´el´ements
finis : l’emploi d’´el´ements finis mixtes conformes H(div) [5], ou la r´egularisation qui permet
d’employer des ´el´ements finis de Lagrange [6]. Lorsque U6= 0, seule la r´egularisation permet de
r´esoudre l’´equation de Galbrun par ´el´ements finis.
Dans le cas o`u rot u= 0 en dehors du sillage, la r´egularisation consiste formellement `a
ajouter le terme rotrotudans l’´equation de Galbrun, qui ainsi devient
HM(u) = D2u
Dt2−∆u= 0.(1)
Dans le cas o`u Ω n’est pas convexe et contient un coin rentrant, ce qui est notre cas, il n’est pas
possible de montrer que la solution de l’´equation (1) est ´equivalente `a la solution de l’´equation de
Galbrun. Ceci est dˆu au fait que la solution de (1) est plus r´eguli`ere que la solution de l’´equation
de Galbrun pr`es des bords de la plaque. Ce type de probl`eme est classique en ´electromagn´etisme
lorsqu’on d´etermine le champ ´electrique pr`es d’un coin rentrant d’un conducteur (effet de pointe)
[7]. L’´equation de Galbrun n’est donc pour l’instant pas capable de prendre en compte un obstacle
pr´esentant des coins rentrant dans Ω.
2.2.2 Formulation en pression
La pression satisfait HM(p) = 0 dans Ω\Savec les conditions aux limites [p]=0=[∂p/∂y].
Cependant si on r´esout cette ´equation avec des ´el´ements finis de Lagrange on obtient que pr`es du
bord d’attaque Ade la plaque la pression et la vitesse restent finies (elles se comportent comme
√ro`u rest la distance `a A). Il est connu [8] que ces quantit´es doivent ˆetre infinies pr`es de A.
Il est donc n´ecessaire de formuler le probl`eme avec le potentiel des vitesses ϕ, d´efini par
v=∇ϕen dehors du sillage (ce qui est possible car rot v= 0). On obtient alors que ϕse
comporte en √rpr`es de A, ce qui donne un comportement singulier de pet de ven 1/√r.
3 Formulation du probl`eme en potentiel des vitesses
3.1 Equations
Si on note ϕinc le champ incident, le potentiel des vitesses diffract´e ϕsatisfait HM(ϕ) = 0
dans Ω\S. Sur le sillage on a [∂ϕ/∂y] = 0 = D[ϕ]/Dt = 0 donc [ϕ] = F eikx/M o`u Fest
l’amplitude du sillage. Enfin sur la plaque on a ∂ϕ/∂n =−∂ϕinc/∂n et ∂ϕ/∂n = 0 sur les parois
du conduit.
3.2 Conditions de rayonnement
Il reste `a ´ecrire les conditions de rayonnement `a l’infini. Pour cela nous avons besoin des modes
propres du guide, sur laquelle toute vibration du fluide se d´ecompose (en dehors de la plaque et du
sillage). Les modes propres sont ϕ±
n=eiβ±
nxcos (nπy/h) avec nun entier, solution de HM(ϕ±
n) = 0
dans tout le guide. Pour n < kh/π√1−M2on a β±
n= [−kM ±pk2−(1 −M2)(nπ/h)2]/(1 −
M2) : il s’agit alors d’un mode propagatif. Pour n > kh/π√1−M2on a β±
n= [−kM ±
ip(1 −M2)(nπ/h)2−k2]/(1 −M2) ce qui correspond `a un mode evanescent. Les modes +
correspondent aux modes qui rayonnent vers la droite, et les modes −rayonnent `a gauche.
Les conditions de rayonnement expriment le fait que tout champ diffract´e vers la droite (res-
pectivement vers la gauche) ne se d´ecompose que sur les modes + (respectivement sur les modes
−). La prise en compte des conditions de rayonnement `a l’infini lors de la r´esolution num´erique
3

du probl`eme de diffraction en domaine born´e est classique et est r´ealis´ee en introduisant des
conditions transparentes sur les bords du domaine [9].
3.3 Probl`emes pos´es par le sillage
Le sillage pose trois probl`emes :
1. son amplitude Fest une inconnue du probl`eme. Elle est fix´ee en appliquant la condition de
Kutta [1, 2, 3] : la vitesse doit ˆetre finie au bord de fuite de la plaque. Il est donc n´ecessaire
de connaˆıtre finement le comportement du potentiel des vitesses pr`es du bord de fuite.
2. en pr´esence de sillage la condition de rayonnement `a droite n’est pas valable (on a [ϕ±
n] =
0,∀n, incompatible avec un sillage).
3. la r´esolution num´erique est effectu´ee dans un domaine born´e alors que le sillage correspond
`a un terme source qui s’´etend jusqu’`a l’infini.
Pour rem´edier `a ces probl`emes on se ram`ene `a r´esoudre deux probl`emes sans sillage.
3.4 D´ecouplage du probl`eme
On introduit la d´ecomposition du potentiel des vitesses ϕ=ϕa+F ϕS.ϕasatisfait le probl`eme
de diffraction sans sillage, et ϕSest solution du probl`eme de diffraction avec un sillage d’am-
plitude unit´e : HM(ϕS) = 0 dans Ω\Savec [ϕS] = eikx/M , [∂ϕS/∂y] = 0 et ∂ϕS/∂n = 0 sur
∂D ∪Γ.
Afin de se ramener `a un terme source de support fini, un rel`evement est utilis´e.
3.4.1 Rel`evement
On introduit la fonction ζ(y) solution de HM(ζeikx/M ) = 0 dans le guide sans plaque mais en
pr´esence d’un sillage infini. On obtient
ζ(y) = ½ζ−(y) = Acosh (ky/M) si y < η,
ζ+(y) = Bcosh [k(h−y)/M] si y > η.
Aet Bsont calcul´es tels que £ζeikx/M ¤=eikx/M ,£(dζ/dy)eikx/M ¤= 0 et ∂¡ζeikx/M ¢/∂n = 0 sur
∂D. Alors on peut d´efinir le champ de sillage ˜ϕS=θ(x)ζ(y)eikx/M .θest une fonction C2(R) qui
tient compte de la pr´esence du sillage uniquement en aval de la plaque : θ= 0 si x < d1et θ= 1
si x > d2, o`u 0 < d1< d2< L.
Remarque : ce n’est pas vraiment le sillage mais plutˆot ˜ϕSqui pr´esente un comportement
singulier lorsque M→0. En effet ˜ϕSoscille horizontalement avec une longueur d’onde λet
s’´etale verticalement sur une epaisseur δ, toutes deux variant en M/k.
3.4.2 Probl`emes de diffraction r´esolus
On consid`ere le probl`eme mod`ele de diffraction P:HM(ϕ) = fdans Ω, ∂nϕ=gsur
Γ, ∂nϕ= 0 sur ∂D avec en plus les conditions de rayonnement. On obtient que si on utilise la
d´ecomposition ϕ=ϕa+F( ˜ϕS+ϕc), alors ϕasatisfait le probl`eme Pavec f= 0 et g=−∂ϕinc/∂n,
tandis que ϕcsatisfait aussi ce probl`eme avec f=−HM( ˜ϕS) (de support contenu dans ]d1, d2[)
et g=−∂˜ϕS/∂n.ϕcest appel´e le champ correctif.
4

3.4.3 D´etermination de F
Pour appliquer la condition de Kutta il faut connaitre le comportement de ϕcau voisinage
du bord de fuite Bde la plaque. Pour cela on d´etermine le champ correctif dans la boule Σ de
centre Bet de rayon R(voir Fig.2). On choisit le rayon suffisamment petit pour que le terme
source HM( ˜ϕS) soit nul dans la boule (il faut simplement R < L −d2). Alors on peut d´eterminer
analytiquement ϕc(d´ecomposition sur une base de fonctions de Bessel) `a condition qu’on ait
une condition de Neumann homog`ene sur Γ+, le bout de plaque dans la boule (∂˜ϕS/∂n 6= 0 sur
Γ+). Il faut introduire un nouveau rel`evement pour avoir une telle condition aux limites.
Σ
∂Σ
Γ+B
Fig. 2 – Boule construite autour du bord de fuite
C’est cette ´etape qui pose des probl`emes num´eriques lorque la vitesse de l’´ecoulement por-
teur est faible. En effet une premi`ere id´ee ´etait de d´efinir la variable ψ=ϕc+ψSo`u ψS=
ζ−(y)θ(x)eikx/M dans tout Ω. Ainsi on a bien ∂ψ/∂n = 0 sur Γ+, et ψpeut ˆetre calcul´e ex-
plicitement dans Σ [9]. Cependant on obtient sur la paroi sup´erieure du conduit ∂ψ/∂y =
A(k/M) sinh(kh/M)θ(x)eikx/M , qui prend de grande valeur lorsque M→0. Pour rem´edier `a ce
probl`eme, nous avons utilis´e un autre rel`evement en utilisant la mˆeme fonction ψSmais d´efinie
seulement dans la boule Σ (et nulle en dehors de la boule). Ainsi le terme source n’est plus loca-
lis´e sur le bord sup´erieur du conduit mais sur le bord ∂Σ de la boule, o`u le facteur d’amplification
(k/M) sinh(ky/M) prend des valeurs beaucoup moins grandes.
4 R´esultats
4.1 Comportement de Fpour M→0
Sur les figures 3 et 4 sont repr´esent´ees les isolignes des parties r´eelles du champ total ϕinc +ϕ
pour M= 0.3. La Fig. 3 correspond `a L= 4 et k= 2 tandis que la Fig. 4 correspond `a une
Fig. 3 – Isolignes de la partie r´eelle du potentiel des vitesses total pour M= 0.3, L= 4 et k= 2
plaque plus courte L= 1 et une fr´equence plus basse k= 1. Les tourbillons constituant le sillage
apparaissent nettement derri`ere la plaque.
L’´evolution de F(M) pour deux valeurs de la longueur de la plaque et deux fr´equences est
repr´esent´ee en Fig. 5. Il apparaˆıt que Fvarie comme √Mlorque la vitesse de l’´ecoulement est
faible. Ce r´esultat avait ´et´e obtenu semi-analytiquement dans le cas d’une plaque semi-infinie,
5
 6
7
8
6
7
8
1
/
8
100%